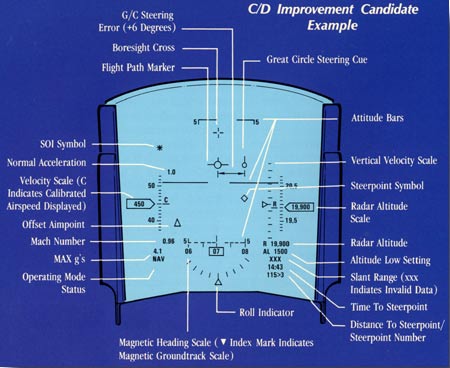
Visiônicos
Ao contrário do F-5E e Mirage III, o AMX já está
equipado
com um HUD (Head-up Dispay), mas será trocado por um mais
moderno.
O HUD é importante durante as missões a baixa altitude
por
mostrar todos os dados relevantes durante o vôo sem que o piloto
precise
baixar a cabeça para monitorar os sistemas da aeronave.
Um HUD moderno é composto dos seguintes sub-sistemas:
- Um CRT - tubo de raios catódicos
- um computador digital
- um conjunto de vidros chamados PDU - Pilot display unit
- um conjunto de lentes colimadoras
- um painel de controle abaixo do PDU (UFPC – Up Front Control Panel)
- outros subsistemas como gerador que recebe dados dos sensores,
computadores
para a regulação automática do brilho em
função
da luz externa, etc.
Um HUD moderno é integrado com o sistema de
navegação
e ataque da aeronave e com o sistemas de gerenciamento de sensores e
armas.
No caso de ataque contra alvos pré-planejados, antes da
missão
o piloto introduz no computador de bordo os dados relevantes da
posição
do alvo, seleciona os modos de disparo e a arma que será usada.
Após a decolagem o sistema de navegação mostra dos
dados
e controles necessários para manter o curso e altitude e os
mostra
no HUD. Próximo do alvo, o HUD muda de modo automaticamente e
começa
a mostrar dados de TOT (tempo sobre o alvo) e uma linha que representa
a
trajetória de lançamento da arma com o CCIP superposto
(Continuosly Computed Initial Point/Ponto Inicial Continuamente
Computado).
Outras simbologias mostram a posição do alvo e a
direção
do designador laser se estiver presente. O piloto alinha o laser
com
a posição do alvo pré-computada e os dados de
altitude
e distancia do alvo são automaticamente carregados no sistema de
navegação
e ataque para possíveis correções de
posição.
Quando a simbologia do CCIP coincide com o alvo, as armas são
lançadas
no modo automático ou manual.
O sistema permite uma grande melhoria da pontaria com armas "burras",
pois
numa velocidade de 1000km/h, uma antecipação de 1/5 de
segundo
pode significar um erro de mais de 50 metro.
Logo após o lançamento das armas, a simbologia do HUD
mostra
"conselhos" sobre como e quando evitar estilhaços das armas, e
depois
passa a indicar o caminho para voltar para base ou para atacar outro
alvo.
Caso durante uma missão de combate o piloto localize um alvo de
oportunidade
ou seja designado para outro alvo, ele define o modo de ataque e as
armas
a serem usadas. Neste modo o HUD mostra a trajetória da arma e o
CCIP,
mas não a posição do alvo pois o computador
não
conhece. O piloto é que aponta o CCIP para a
posição
do alvo identificada visualmente e dispara a arma manualmente.
O modo CCRP é
usado para alvos
pré-planejados com CEP de 50 metros se for conhecida a distancia
e direção
do alvo como alvos facilmente reconhecíveis no radar como curva
de rio, prédio
alto ou montanha distinta. O caça sobe, tira "foto" do terreno
com radar
(congela imagem) e escolhe alvo. O alvo pode ser recebido por datalink
ou
determinado durante o planejamento da missão. O piloto segue
sinais de direção
e aperta o gatilho autorizando o disparo automático quando o
computador desejar.
Lança chaff, flare e outras despistadores durante o ataque. Se o
piloto pretende
fazer correção visual e refinar a pontaria pode apertar o
gatilho duas vezes
e disparar quando quiser como no modo CCIP. A experiência inicial
mostrou
que estas técnicas são melhores com dois pilotos: um voa
e outro opera os
sistemas sistema o que é importante nas fases críticas.
Os sistemas de ultima
geração permite o uso de um piloto e manter a
eficiência. Ameaças de alta
intensidade ainda pede dois tripulantes, para navegar a longa distancia
e/ou
defensiva no ataque.

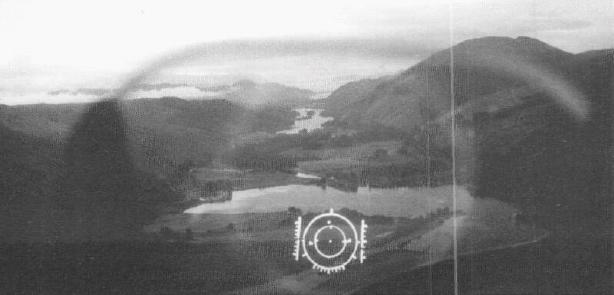
CCIP no HUD de um F-16 atacando a usina nuclear iraquiana de Osirak em 7 de
junho de 1981 durante a operação Opera. O "pippe" de pontaria está na
parte inferior da tela. Todas as 16 bombas lançadas pelos 8 F-16
acertaram o reator
(quase no centro da figura). O novo HUD do AMX terá um
ângulo de visada de 24 graus.
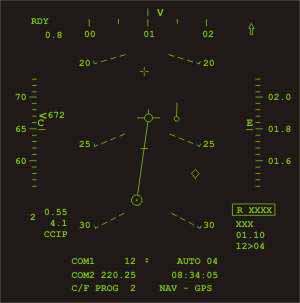
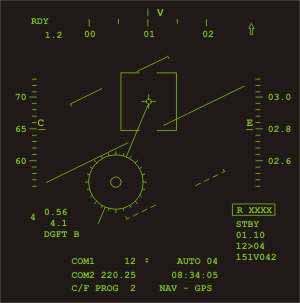
 Detalhes do HUD do
F-16 no modo CCIP.
Detalhes do HUD do
F-16 no modo CCIP.
Sistema
LCOOS do F-111. O pipper é o ponto de referência de pontaria. Em
1971
o computador do A-7 Corsair II era capaz de corrigir o CCIP 25 vezes
por
segundo. Os sistemas atuais são muito mais capazes. O F-16 em
1979
tinha precisão de 7 milésimos ou erra 30cm a cada 1000
metros.
Lançando a 8000 metros do alvo o CEP é de 60 metros.
Melhorou
para 30 metros a 2000 metros de distância atualmente. Com
pontaria
manual das miras antigas, o piloto define um ângulo a velocidade
para
definir um ponto fixo na mira. A bomba é lançada em uma
altitude
pré-determinada também calculada. O piloto leva cerca de
15
segundos voando praticamente na mesma direção para
acertar
a mira. Um diretor de tiro como o FILA leva cerca de 5 segundos para
fazer
pontaria e destruir uma aeronave.
Simbologia do HUD do
F-16.
Os aviônicos modernos
permitem a entrada de dados de
alvos não planejados durante o vôo via datalink (real time
target
datalink), e se possível os procedimentos a serem adotados para
lançamento
automático.
Simbologia do HUD da Elbit nos modos CCIP e modo ar-ar com
canhão.

Imagem da simbologia
do HUD da empresa OMI/Alenia usado no AMX.
O HUD que deve ser usado no AMX modernizado será
o modelo 921 Head-Up Display (HUD) da Elbit. O HUD 921 é capaz de mostrar
simbologia de alto brilho em modo cursivo ou raster. O HUD incluiu um Up Front Control Panel (UFCP)
e pode acomodar um Colour
Cockpit TV Sensor (CCTVS) de alta resolução para debriefing pós voo. O campo
de visão é de 24 graus circular. O peso é de 17kg.
Para vôos noturnos a imagem do FLIR são projetadas no HUD.
Para
isso o HUD deve ter um grande campo de visão. As
limitações
ocorrem quando a cabeça do piloto está muito longe do
sensor como
no caso do F-16. O HUD também não pode estar muito
próximo
para evitar problemas durante uma ejeção. A melhor
solução
é usar lentes grandes. O uso de servos e lentes duplas permite
que
o piloto veja partes extras da imagem movendo a cabeça. Os HUDs
holográficos
atuais permitem um campo de visão de pelo menos 20 x 30 graus.
Mesmo com melhorias no campo de visão dos HUD, ele ainda
é
estreito. Este problema é serio durante os vôos noturnos,
quando
o setor que apresenta imagem FLIR ou LLTV é a única
janela
no escuro. Mesmo os HUDs avançados não podem dar
visão
total ao redor e o campo de visão se restringe ao eixo da
aeronave.
Cada vez que o piloto vira a cabeça, a "janela" desaparece. O
HUD
também é claramente limitado para explorar a capacidade
dos
mísseis ar-ar de combate aéreo de última
geração
e para apontar sensores.
A solução intuitiva seria colocar o HUD o capacete do
piloto
o que se tornou possível com a miniaturização dos
sistemas
eletrônicos.
O sistema mais simples seria uma mira montada no capacete (HMS) que
serviria
apenas para apontar o sensor na direção da cabeça
do
piloto. Os primeiros HMS era pesados e logo apareceram modelos mais
leves
e mais capazes.
O AMX será equipado com o capacete DASH 4 da Elbit, já
usado
nos F-15, F-16 e F-4 de Israel. Ele é conectado ao sistema de
navegação,
sensores de mísseis, radar e HUD. As funções
mostradas
no capacete são localização e distância do
alvo,
zona de lançamento de mísseis, informações
de
vôo (velocidade, altitude, etc) e alertas.
Mesmo movendo a
cabeça e olhando para um dos lados do canopí, o piloto
não perde contato visual com as informações vitais
para o cumprimento de
sua missão. Além de aumentar a consciência
situacional,
uma vez que todo o céu à sua volta passa a ser facilmente
monitorado, o piloto
pode se usar o DASH para lançar mísseis com capacidade
off-boresight, ou
seja, bem fora da linha visada do nariz
da aeronave.
DASH atual de terceira
geração é capaz de mostrar imagens do FLIR
diretamente
na altura dos olhos do piloto e para onde ele olhe. Um HMD deve ser
leve, pelo menos 2kg e o ideal é 1,5kg. A
limitação
atual é o campo de visão que está limitado a um
cone de 10
graus.
O DASH poderá ser usado para designar alvos para mísseis
ar-ar
e ar-superfície e para apontar sensores como o radar, casulo
designador laser
e de reconhecimento. Também pode atualizar pontos de baliza para
o
sistema de navegação/INS.
A França está usando computadores portáteis
(palmtop) com tela sensíveis
ao toque que ficam no joelho para mostrar dados e mapas. É uma
possibilidade futura para os pilotos de AMX.

O DASH pode ser usado para adquirir alvos de oportunidade
sendo
muito mais rápido que os sistemas convencionais. Isto
facilitaria
muito o trabalho nas missões de supressão de defesas
contra
baterias de canhões e mísseis antiaéreos inimigos.
SCP-01Na FAB o AMX
foi planejado para realizar missões que na Itália seriam realizadas pelo Tornado IDS como
ataque estratégico, ataque anti-navio e supressão de defesas. A primeira
diferença foi a necessidade de um radar mais capaz e por isso o
telêmetro da FIAR usado nos AMX italianos não foi aceito. A FAB queria um
radar mais capaz e assim foi iniciado o projeto do radar SCP-01.
Os AMX da FAB serão equipados com o radar multimodo Mectron
SCP-01
Scipio (Scipio foi um militar italiano que derrotou
Atila). O Scipio é um
radar otimizado para funções ar-superfície
com alguns modos simples ar-ar. O radar tem
a função de auxiliar o piloto a fazer
operações de ataque ao solo e combate
aéreo. Foi projetado para ser instalado a bordo do AMX e ser o
sensor principal do subsistema de armas.
Os modos ar-ar incluem busca e rastreamento, quatro submodos de combate ar-ar
e busca de avião tanque e busca enquanto rastreia (TWS). Os modos
ar-superfície incluem busca ar-mar com rastreamento monopulso, busca ar-mar com TWS,
mapeamento e telemetria ar-solo. O radar emprega diferentes formas de onda (pulsos e frequência de
repetição de pulsos - PRFs), padrões de busca da antena e algoritmos
de processamento. O radar
é capaz
de identificar um alvo de 100 metros quadrados no mar a 50 milhas e tem
alcance
de 20 milhas contra um alvo aéreo de 5 metros quadrados.
Outras características são agilidade de frequência na banda I (8
a 10 GHz), compressão de pulso, operação Doppler com média PRF, antena monopulso de dois planos,
técnicas avançadas de ECCM (contra-contramedidas
eletrônicas), processamento avançado de sinais configurado por software,
rejeição de clutter e rastreamento de alvos por
algoritmos adaptativos, processamento de imagem, com zoom no alvo e congelamento de
imagem, integração com o sistema de missão via barramento de dados
digital 1553B e saída para TV com gráficos em cores. O radar SCP-01 foi projetado segundo o conceito LRU (Line
Replaceable Units - unidades substituíveis na linha de voo) com
sistema BIT de detecção de falhas. O peso é menos de 75kg.
O radar ainda pode incorporar as capacidades de Doppler Beam Sharpening,
Weather avoidance, Terrain Avoidance/Contour Mapping, Ground Moving
Target Indication and Tracking.
A interface do SCP-01 com o piloto é feita pelo painel de
controle e HDD - Head Down Display. No A-1M, AMX
modernizado, o radar será totalmente integrado ao MFCD (Multi-Funciton
Color Display). O controle é por meios de botões no manche e
manete (padrão HOTAS).
O
projeto do radar SCP-01sofreu atrasos sucessivos, ocasionados por problemas
financeiros das duas primeiras empresas contratadas pela Aeronáutica para
gerenciá-lo.
A empresa Mectron Engenharia, de São José dos
Campos, iniciou a fase de homologação do SCP-01 no ano
2002. A Mectron entrou projeto no ano 2000 substituindo a Tecnasa e
a Tectelcom Aerospacial.
O primeiro protótipo era da Tecnasa, com
integração feita na Itália e testes no Brasil. O
projeto foi iniciado em 1989 e deve
ser homologado em 2003.
A Tecnasa foi contratada em 1987 para produzir o SCP-01 junto com SMA
italiana.
O cronograma previa o termino do projeto em 1994 e entrada em
serviço
no AMX em 1995. A tecnasa produziria a antena,
receptores/excitadores/processador
analógico de sinais, painel e estrutura mecânica, mas o programa se
arrastou por falta de verbas. A SMA
produziria
o transmissor e processador digital de sinais. Os testes estavam
planejados
para iniciar no BAe 125 da FAB em 1989. O SCP-01 foi mostrado pela primeira vez no
Chile em 1990, na FIDAE 90. A Aeroeletrônica entrou no projeto em
1995.
A Mectron ficou encarregada de continuar o
desenvolvimento do receptor, servo atuador, antena, todo o frame de
instalação do radar, banco de testes, etc. Esperava-se que as primeiras
unidades fossem entregues em meados de 2003 para serem instalados nos AMX
que estariam sendo modernizados na época, mas o programa de modernização do
AMX foi atrasado.
A versão
final inclui algumas
modificações em relação ao projeto original, feitas para atender os requisitos
ambientais exigidos para um radar de aeronave militar. As exigências estão
relacionadas a níveis de vibração, temperatura, pressão e choque mecânico.
A
coordenação
do projeto é da empresa Galileo italiana, agora parte da Selex, que também
desenvolve
o processador e transmissor. A Mectron é responsável pelo
receptor,
servo atuador, antena e bandeja de instalação no nariz. A
Mectron
fez a integração e testes de dois protótipos e
ensaio
de vôo com o primeiro modelo e já está montando o
4o
protótipo. A Mectron recebeu um contrato de US$4 milhões
para
desenvolver e US$15 para produção dos 54 radares. Os
custos
totais do programa ultrapassam US$50 milhões. O desenvolvimento inicial e a fase de protótipos do
contrato somam US$ 67 milhões. O contrato
completo, incluindo a fase de produção subsequente,
totaliza US$ 187 milhões de dólares e deve ser concluído
até 2014.
Em 1995 a BAe Aerospace recebeu um contrato de US$3,8 milhões
para
desenvolver e testar o radome do radar no nariz do AMX.
Durante a fase de testes no mar da fragata Defensora
(programa MODFRAG), um AMX da FAB equipado com o SCP-01 foi usado para
validar os equipamentos MAGE do navio.
 Radar
SCP-01 Scipio. O radar já está em testes no AMX e foi
usado
recentemente para simular mísseis anti-navio e testar os
lançadores
de chaff da Marinha.O SCP-01 pesa menos de 75 kg.
Radar
SCP-01 Scipio. O radar já está em testes no AMX e foi
usado
recentemente para simular mísseis anti-navio e testar os
lançadores
de chaff da Marinha.O SCP-01 pesa menos de 75 kg.

Radar SCP-01 instalado no AMX.
 Radar EL/M-2001B
usado nos AMX italianos. Este radar é muito compacto e pesa
apenas 50kg.
Radar EL/M-2001B
usado nos AMX italianos. Este radar é muito compacto e pesa
apenas 50kg.

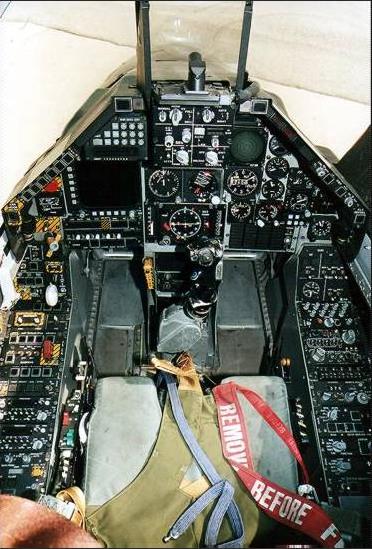
Cockpit atual do AMX da FAB.
Cockpit italiano com telas
multi-funções da GSSA.
Painel do AMX
Painel direito (de
trás para frente):
Main Computers control panel
SAHR - (Stand-by Attitude and Heading Reference system) control panel
INS - (Inertial Navigation System) control panel
Navigation modes control panel
TACAN - (TACtical Air Navigation) control panel
IFF - (Identification Friend - Foe)
Audio signal control panel
Hydraulic & electric system control panel
Painel esquerdo:
Chaff/Flare dispensing system control panel
COMM 2 control panel
COMM 1 control panel
Radar Ranging control panel
FIX/MARK control panel
Electronic Flight Control System (EFCS) control panel
Emergency trim control panel
Landing gear lever
Engine and APU starting control panel
Painel central da esquerda para a direita:
Weapons Control panel - (WCP) abaixo do MFD
Navigation Data Entry keyboard - (NDE) acima do MFD
Mission data loading device ao lado do manche
Horizontal Situation Indicator - (HSI)
Mach-anemometer
ADI: Attitude Direction Indicator
HUD Control panel
Display RWR - (Radar Warning Receiver)
Central Warning Panel - (CWP)
CNI
Os aviônicos
do AMX irão contar com um sistema CNI (Communication,
Navigation,
Identification) que opera em freqüências V/UHF e que integra
as
funções de rádio, IFF, VOR/ILS/Marker Beacon/DME
com
informações do datalink digital que passam a ser
gerenciadas
pelo sistema de computação do avião.
O AMX
provavelmente irá usar o mesmo rádio aerotransportado
VHF/UHF (30-400MHz)
Rohde & Schwarz M3AR (Serie 6000), adquiridos para equipar o ALX.
O rádio modular controlado por software M3AR pesa menos de 4kg e
pode aceitar os modos de contra-contramedidas HaveQuick
(americano/OTAN),
SATURN (britânico), SECOS (escolhido pela FAB) e UHF DAMA para
comunicação
de satélites, além de VHF de datalink de trafego
aéreo
(25/8.3kHz) e VHF AM e FM apenas com instalação de
software.
O rádio muda de frequência a 200hops/segundo (SECOS 1) ou
500hops/s
(SECOS 2) e 8.5hop/s na banda HF(se disponível). A transferência
de
dados é de 64kbits/s ou maior para retransmissão de dados
e
vídeo na faixa V/UHF e 5.4kbps (9,6kbps por pouco tempo) na
banda
HF (não usado). As freqüências selecionadas e os
modos
de operação são controles por software e
apresentados
nas telas multifunção e UFPC.
Os rádios fazem parte da família de rádios
multibanda e multifrequência programáveis
da família M3XR e inclui versões navais M3SR/Serie 4400 e
terrestre M3TR
desenvolvidos desde 1997. A versão aérea também
equipa os caças JAS-39 Gripen
lote II e III. Com modem externo podem ter interface com o Link 4
(STANAG
5504), Link 11 (STANAG 5511), Link 16 e Link 22 (STANAG 5522).
Os rádios com sistemas de contramedidas do tipo salto de
frequência - frequency
hopping são padrão atual para segurança de
comunicações. O salto de frequência
quebra o sinal em pequenos pacotes e os transmite em diferentes
frequências
de acordo com um padrão pré-determinado. Se o
padrão é conhecido, é possível
seguir o sinal e receber a mensagem completa, mas sem o código
dos saltos
a mensagem inteira é perdida no ruído geral.

Rádios M3AR com o UFPC abaixo do HUD. No console do avião, deixam
de existir os tradicionais painéis de controle
independentes de cada rádio. As freqüências
selecionadas e os modos de operação
são controles por software e apresentados nas telas
multifunção e UFPC. Para comparar, o terminal
de datalink de terceira geração para caças
MIDS-LVT da OTAN usado com o LINK 16 pesa 29kg e tem taxa de
transmissão de 200kps.
O rádio será usado para transmitir os dados digitais pelo
rádio
M3AR que funcionará como datalink. O protocolo será o
mesmo
adotado pelo SIPAM/SIVAM nos R-99A/B, F-5EM e A -29 ALX, permitindo que
todos
esses aviões possam trocar dados. O datalink também
permitirá
que diversos AMX possam se comunicar e trocar mensagens com
posições
em terra sem entregar suas posições.
Os centros de comando fazem
as
informações de inteligência e planos virarem
ação.
As comunicações são o centro do Comando e Controle
pois
se as ordens não forem passadas não é
possível
controlar.
O uso de datalink tem limitação nas missões
ar-solo pois as comunicações
em linha de visada VHF podem ser perdidas em vôos a baixa
altitude devido
a quebra da linha de visada devido ao relevo e outros obstáculos.
O datalink poderá ser usado para funções ofensivas
e defensivas no AMX. O
datalink troca informações de sensores para compilar um
quadro tático enviado
para todos usurários. A designação de alvos
se torna mais eficiente, evita
engajamento do mesmo alvo por mais de uma aeronave e
coordenação do tempo
sobre o alvo. O datalink pode ser um meio de designar alvos rapidamente
para
outras aeronaves em missões de apoio aéreo aproximado,
controle aéreo avançado,
reconhecimento, ataque anti-navio e supressão de defesas.
No uso defensivo, o datalink melhora o apoio mútuo, aumenta
sobrevivência,
auxilia operações encobertas sem emitir e evita fogo
amigo. O datalink pode
passar informações necessárias para defender de
meios aéreos, terrestre e
eletrônicos.
O datalink permite aproveitar dados dos sensores de outras aeronaves e
não
fica reduzido a limites do radar e transmissão de rádio.
As informações necessárias
como quadro aéreo tático, situação
terrestre e eletrônica precisam chegar
na cabine por um datalink protegido contra interferência, ser
mostrada de
forma priorizada e visual. A identificação das
plataformas amigas deve ser
redundante e o datalink é um modo de identificação
positivo de alvos amigos.
O datalink também é um meio de troca de dados como a
transmissão de imagem
do casulo designador de alvos, imagem do radar, alerta radar, casulos
de
reconhecimento, além de dados da aeronave como velocidade,
posição, combustível
e armamento e condições dos sistemas.
Para aprimorar a
navegação o AMX será equipado com um sistema
inercial/GPS H-764G (embedded GPS/INS (EGI) H-764G ) com
giroscópios a laser,
fabricado pela Honeywell, capaz de receber um cartão GPS que
serve para atualização
da informação inercial. O INS/GPS é de
última geração e pode ser alinhado
em vôo, o que permite que possa ser re-iniciado no meio de uma
missão.
Pode ser instalado em aeronaves de combate, cargueiros e
helicópteros. É
usado em 70 aeronaves de 30 nações. É baseado no
giroscópio laser digital
Honeywell GG1320AN, acelerômetro Honeywell QA-2000 e receptor GPS
Collins
GEM.
O sistema tem hardware e software flexível. Tem dois a quatro
slots que podem
ser usados para outros circuitos ou outras funções,
sistema de estabilidade
aumentada, módulos de radar altímetro ou TERPROM. Usa um
processador Intel
80960, com interface para databus 1553B e quatro RS-422.
Os modos de navegação são triplos, só
inercial, só GPS ou duplo. A precisão
é de CEP 1<1 milha/h no modo (INS), velocidade <1m/s
(INS), CEP <16m
(INS/GPS), velocidade < 0,03m/s (INS/GPS) e TERPORM com limite
horizontal
com CEP <30m e vertical <1 rm. A fábrica garante um
impressionante
MTBF (Mean Time Between Failure - tempo médio entre falhas) de
6.500 horas.
O sistema alinha em 4 minutos, com leitura de dados de 30 segundos. No
ar,
o sistema alinha em 4 minutos. Os limites de altitude são
ilimitadas, o razão
angular permitida é >600 graus/seg, a
aceleração angular >2000 graus/seg/seg,
a aceleração máxima é de 21g's em todos os
eixos. Os limites de temperatura
são de -54 a + 71 graus centígrados.
O H-746G mede 17,8 x 17,8 x 8x24,9cm e pesa 8,4kg precisando de 40watts
de potência para funcionar.
O INS
é
vital para apontar sensores eletroóticos e radar para o alvo ou
coordenadas
gravadas, e realizar ataque automático ou cego. Permite
vôo
automático acoplado com o computador de navegação
e piloto
automático. É um equipamento essencial para operar em
mar aberto.
Sistemas Defensivos
O
AMX, além de ser capaz de localizar e identificar o alvo e ter
boa
pontaria, tem que ser capaz de sobreviver no cenário onde atua,
penetrando
as defesas e conseguindo voltar para casa, para cumprir a
missão.
Com muitas perdas não poderá vencer a guerra. Sem uma boa
capacidade
de sobrevivência, só poderá realizar missões
de
pouco risco, podendo mudar as táticas e até ser relegado
a
tarefas de segunda linha. Para se defender, o AMX
pode usar sistemas de guerra eletrônica, velocidade, altitude,
armas defensivas e apoio externo.
Guerra Eletrônica
Um sistema de Guerra Eletrônica aerotransportado deve dar a
aeronave as seguintes capacidade:
- Penetrar território hostil com grande chances de
sobrevivência
- Mostrar um quadro tático para o piloto
- Facilitar modos de direção de tiro para os sensores na
presença de contramedidas eletrônicas
Os sistema de guerra eletrônica também deve ter as
seguintes características:
- Detectar e mostrar sistemas de armas inimigos
- Ter cobertura de 360 graus
- Localizar ameaças com precisão
- Avaliar ameaças, e se possível, ativar defesas
automaticamente com programação prévia
Os sistemas de guerra eletrônicos podem ser internos ou
descartáveis. Podem
ser do tipo interferidores que degradam a capacidade dos sensores
inimigos
com interferência e ruídos para mascarar a presença
ou posição e despistadores
que criam alvos falsos.
Os sistemas de guerra eletrônicos são uma tecnologia que
atuam junto com
táticas, procedimentos e treinamento para diminuir a
suscetibilidade nas
seguintes formas:
- Diminuir a assinatura para os sensores inimigos não sentir a
presença.
- Camuflagem. A aeronave não pode ser distinguido das
emissões de fundo.
- Engano. A aeronave é vista claramente, mas parece
ser outra coisa qualquer.
- Chamariz. O alvo percebido é falso e o sensor/arma inimigo
ataca.
- Confusão. A aeronave é detectada junto com outros alvos.
- Ocultação. A aeronave usa o contorno do terreno durante
o vôo ou estrutura fabricada (em terra).
- Interferência. O sensor inimigo é cegado ou se torna
inoperante. O alvo pode se mover livremente.
O AMX pode dar aviso ao piloto de ameaças guiadas por radar na
forma
de mísseis ar-ar, mísseis SAM e artilharia
antiaérea
com o RWR (Radar Warning Receiver - sistema de alerta radar) ELT-156X
que
será trocado por outro modelo. O sistema é fabricado sob
licença
na Aeroeletrônica (Grupo Aeromot) substituindo a Tectelcom.
O RWR ELT/156X da Elettronica tem grande cobertura de
frequência e azimute. Por usar memória EEPROM pode ser reprogramado na linha
de voo. A imagem do mostrador pode dar imagem imediata do ambiente ao redor
e modo sintético para uma ameaça identificada, além do alerta sonoro. Um
link RS-422A é usado para se comunicar com outros sistema de guerra
eletrônico da aeronave. O peso total do sistema é de 17,7 kg incluindo
antena, processadores e mostrador. A Itália também usa o ELT/156X nos seus
helicópteros EH 101. O sistema será atualizado pois para os padrões atuais o
tempo de reação é lento assim como a biblioteca de ameaça está
desatualizada. O sistema provavelmente será trocado pelo mesmo sistema da
Elisra adotado no F-5EM.
O AMX também está equipado com equipamentos ativos e
passivos de contra-medidas
eletrônicas. Os sistemas passivos são os chamarizes
"flare" e de tiras reflexivas
"chaff", cujo lançamento no ar procura desorientar a
ação de mísseis guiados
por infravermelho ou radar ativo/semi-ativo, respectivamente.
As contramedidas ativas disponíveis são de
responsabilidade do intereferidor
Elettronica SpA ELT-553 Active Electronic Counter Measure System (AECM)
produzido
na Itália. O interferidor é instalado internamente o que
libera os cabides
para levar armas e combustível. O interferidor ELT/553(V)-2
da Elettronica SpA é capaz de contrapor ameaças de pulse e CW com
interferência de engodo (deception). A operação pode ser automática e pode
ser programado na linha de voo. Pode operar sozinho ou em conjunto com o
RWR. O ELT/553(V)-2 vem um um módulo pulso de banda baixa (banda E até H),
um módulo de pulso de banda alta (banda H até J), e um módulo dedicado a
onda contínua (CW) contra mísseis semi-ativo. O interferidor usa jammer de
repetição, opera contra emissores staggered e jittered, contra densidade de
frequência e agilidade de frequência e capacidade multiameaça. O peso total
é de menos de 80kg. O sistema está em operação nos AMX da FAB e Itália e nos
Tornados IDS da Itália. O sistema é considerado de segunda geração. Na FAB é
chamado de ELT/553-MK1 e deve ser substituído na modernização.
O ELT-553 é um sistema de embaralhamento que fornece
proteção
ativa contra radares de busca, iluminadores de onda contínua
(CW)
e radares de mísseis. O sistema é capaz de engajar
ameaças
múltiplas e tem meios de contra-contramedidas.
Para se ter uma idéia da importância destes sistemas, a
Força Aérea Israelense
tinha 160 casulos de contramedidas e 30 sistemas de RWR para a frota de
230
A-4 Skyhawk durante a guerra de 1973. Com a ameaça de
mísseis soviéticos
nas mãos dos Árabes, os A-4 não podiam fazer
interdição no território inimigo.
Para apoio aéreo aproximado tinham que voar baixo e
rápido o que dificultava
a pontaria. Como faziam várias passadas para localizar alvos,
acabavam se
expondo muito e sofriam pesadas perdas para as defesas árabes.

 AMX
lançando Flares
AMX
lançando Flares.
 Os lançadores de flares e
chaff do AMX
ficam na parte traseira da aeronave.
Os lançadores de flares e
chaff do AMX
ficam na parte traseira da aeronave.
Os EF-111 Raven da USAF
faziam
guerra eletrônica de três forma. No modo "stand-off" a
aeronave
ficava a 80km da linha de frente voando em paralelo e em modo de
espera.
Gerava uma cortina de fumaça eletrônica que ocultava o pacote
de
ataque penetrando as defesas. A interferência era do tipo" spot-noise"
de curto período contra radares de alerta em terra ou no ar.
Contra
radares de guiamento era mais difícil pois eles tem agilidade de
frequência.
No modo "close-in" o EF-111 Raven apoiava missões de apoio aéreo
aproximado
e interdição de campo de batalha com um ou dois Raven
voando
baixo junto com as aeronaves de ataque.
No modo escolta ou "deep strike", um com par acompanhava o pacote de
ataque
e subia a mais de 150 metros por poucos segundos para apoiar o
ataque
ou se aparecesse alguma ameaça.
Na Guerra do Golfo a interferência eletrônica dos EF-111 e EA-6B fez as
defesas
iraquianas pensarem que estavam sob ataque. A artilharia
antiaérea
atirou até superaquecer os canhões. Durante o
resfriamento
e rearmamento dos canhões os F-117 atacaram.
Os russos usavam o Yak-28 Brewer, Su-17UM-3K Fitter e Su-24MR Fencer F
com
casulos de guerra eletrônica e ELINT para realizar as mesmas
missões
dos EF-111 e EA-6B.
 Com os novos casulos
Skyshield os AMX
da FAB terão uma capacidade similar, embora bem menor, que os EF-111 e
EA-6B. Em 2006 a FAB comprou três casulos por US$ 42 milhões. Os casulos
foram comprados para os F-5EM mas os testes mostraram que são
incompatíveis. Agora devem ser usados nos AMX do 1/10 GAv.
Com os novos casulos
Skyshield os AMX
da FAB terão uma capacidade similar, embora bem menor, que os EF-111 e
EA-6B. Em 2006 a FAB comprou três casulos por US$ 42 milhões. Os casulos
foram comprados para os F-5EM mas os testes mostraram que são
incompatíveis. Agora devem ser usados nos AMX do 1/10 GAv.
Ameaça de Mísseis
A maior ameaça das aeronaves de ataque não se encontra no
ar na forma de
caças inimigos e sim em terra na forma de mísseis
superfície-ar e artilharia
antiaérea.
A primeira prioridade para conter um míssil se aproximando
é aumentar a distância
com altitude ou velocidade. A segunda é quebrar o trancamento
com o sensor
do míssil ou radar em terra antes do lançamento ou
até mesmo após o lançamento,
se tiver semi-ativo. A terceira é contra a fase de
aquisição do radar de
controle de disparo tentando negar o trancamento (''lock").
O conceito de auto-proteção se desenvolveu empregando a
proteção na camada
mais interna, ou seja, contendo a ameaça na fase terminal. Isso
significa
entrar em pânico, ejetar armas e abortar a missão. Uma
missão abortada é
uma vitória para quem defende.
Pouca prioridade é dada na fase de busca do adversário
(furtividade). É muito
mais difícil enganar radares de busca que radares de
aquisição e controle
de tiro. Poucas nações tem meios de evitar radares de
busca aérea terrestre
como meios como furtividade e interferência. As contramedidas
contra radares
de busca são táticas como seguimento do terreno e atacar
de direção não esperada.
O AMX já mostrou que tem um RCS pequeno e conseguia penetrar as
defesas nas
manobras Red Flag com mais facilidade que os outros caças, onde
mostrou ser
difícil de ser rastreado, devido a pequena assinatura e nunca
foi derrubado.
O AMX recebeu coberturas absorvente de radar (RAM) produzida pelo CTA,
mas
são otimizados para radares de guiamento de mísseis e
não para radares de busca.
Novo RWR
O novo RWR proposto pela Embraer para o A-1M é fabricado pela
empresa israelense Elisra e será parte
integral da aeronave. O aparelho detecta, analisa e alerta o piloto
sobre
emissões de radares de diferentes fontes que estiverem
atingindo. Diversas
antenas espalhadas ao redor do avião detectam essas
emissões e as informações
captadas são enviadas ao computador de missão onde
são fundidas a outras
informações e apresentadas de forma sintética ao
piloto.
A Elisra comercializa dois tipos de RWR. O SPS-20(V) é um RWR
aéreo de baixo
custo capaz de detectar e identificar radares Pulso Doppler. O
SPS-1000V-5
Advanced Radar Warning System é um sistema de
auto-proteção mais sofisticado
e consiste de dois sub-sistemas: um sistema de
auto-proteção básico que detecta
radares clássicos com alta sensibilidade, e um receptor IFM
multicanal que
detecta e identifica radares Pulso Doppler, onda contínua (CW),
alto PRF
e baixo ERP.
Os dois sistemas emita alerta de áudio e visual com curto tempo
de resposta,
podem ter interface com o lançador de chaff/flare e
contramedidas ativas.
Os RWR cobrem 360 graus nas banda de baixa frequência até
18GHz. O sistemas
gravam os parâmetros em vôo e a biblioteca de
ameaças é facilmente reprogramável.
 O SPS-1000V-5
(acima) pesa 28kg. SPS-20(V) (abaixo) pesa 7,5kg.
O SPS-1000V-5
(acima) pesa 28kg. SPS-20(V) (abaixo) pesa 7,5kg.
No modelo original, a informação do RWR era apresentada
em um display dedicado
somente às informações daquele equipamento. Essa
função pode ser projetada
nas telas multifunção, juntamente com as
informações do radar e de outros
sensores.
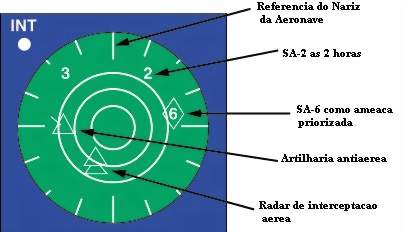 Detalhes da
simbologia de um RWR de terceira geração. Um
RWR pode funcionar como ESM aumentando a consciência da
situação, a sobrevivência
e auxiliar engajamentos. O RWR também pode indicar alvos para
mísseis anti-radiação,
mísseis ar-ar e ar-superfície.
Detalhes da
simbologia de um RWR de terceira geração. Um
RWR pode funcionar como ESM aumentando a consciência da
situação, a sobrevivência
e auxiliar engajamentos. O RWR também pode indicar alvos para
mísseis anti-radiação,
mísseis ar-ar e ar-superfície.
 MFD com quadro de
situação horizontal (RAP - Recognized Air Picture)
com
dados ofensivos e defensivos. A consciência da
situação
é vital para sobrevivência. Um mostrador multifuncional
pode mostrar táticas de emprego de armas, mudanças de
rumo, áreas ideais para vôo a baixa altitude, velocidade
ideal, manobras
evasivas, áreas cobertas por escoltas de supressão de
defesas,
interferência eletrônica e caças.
MFD com quadro de
situação horizontal (RAP - Recognized Air Picture)
com
dados ofensivos e defensivos. A consciência da
situação
é vital para sobrevivência. Um mostrador multifuncional
pode mostrar táticas de emprego de armas, mudanças de
rumo, áreas ideais para vôo a baixa altitude, velocidade
ideal, manobras
evasivas, áreas cobertas por escoltas de supressão de
defesas,
interferência eletrônica e caças.
MAWS e LWR
Os mísseis guiados por IR não dão aviso ao piloto
por
serem passivos. No caso dos mísseis SAM, a maior ameaça
são
os mísseis guiados por IR lançados do ombro (MANPADS).
Entre
1958 e 1992, 80% das perdas de aeronaves de caça para
mísseis
SAM foi de mísseis guiados por IR e 20% por mísseis SAM
guiados por radar. Cerca de 81% das perdas no Golfo foram para MANPADS
e mísseis ar-ar guiados por IR sendo que 12 das 29 aeronaves
derrubadas foram pelo
SA-16 Igla. Os russos perderam mais de 250 aeronaves no
Afeganistão
para os mísseis Stinger.
Nos últimos anos, as perdas para MANPADS na Bósnia
foram: um Mirage 2000D em 1995, um Sea Harrier em 1994, um G-222 em
Seravejo
(1992) e um Etandart IV teve a cauda danificada e conseguiu pousar no
NAe
Foch.
Em 18 anos de combate no
sul
do Líbano, Israel encarou ameaça MANPADS eficientemente
com
detecção de ameaça e contramedidas combinados. Os
helicópteros
e aeronaves voavam baixo sem perdas.
O meio de aviso eletrônico contra estas ameaças são
os MAWS - Sistemas de
alerta de aproximação de mísseis. São
sensores ativos ou passivos que detectam
a presença de mísseis indo em direção a
aeronave. Os americanos estimaram
que o uso do MAWS poderia ter salvo quatro dos cinco AV-8B Harrier
derrubados
na Guerra do Golfo.
O MAWS é muito importante para as missões de apoio
aéreo
onde a aeronave se expõe por muito tempo na mesma área
onde
as defesas estão preferencialmente equipadas com MANPADS. O A-10
teve
perdas quatro vezes maiores que o F-16 durante a guerra do Golfo por
este
motivo. Estudos da USAF aconselharam a instalação de um
MAWS
que cobrisse pelo menos o hemisfério traseiro.
O AMX não está previsto para ser equipado com um MAWS,
mas um modo de improvisar
um MAWS barato é usar o ala voando mais alto e atrás do
que caça que ataca.
Isto gasta uma aeronave só para apoio e se torna um "barato que
sai caro". A instalação de um MAWS passivo custa cerca de
US$ 300 mil por aeronave.
Uma outra medida para quem não usa MAWS é treinar
tripulantes para lançar
flare e chaff continuamente em um padrão (automático) em
áreas de risco onde
é esperado ameaça de mísseis. O lançamento
preventivo pode negar o lançamento
de mísseis ao evitar o trancamento. Em alguns casos o resultado
é melhor
que lançamento reativo, com uso de MAWS.
Para isso a aeronave deve estar equipada com muitos chamarizes (flares
e
chaff) e planejar muito antes da missão para não ficar
sem chamarizes em situações críticas.
De acordo com os israelense o número mínimo de chamarizes
que um caça deve
levar é 300. Defesas não conhecidas durante a rota
é que mais aumentam as
chances de ser atingido e é motivo para manter as defesas em
alto nível.
Outro sensor defensivo que não equipará o AMX é o
LWR - Laser Warning Receiver.
Os sistemas de alerta de laser podem mostrar ameaças de
mísseis guiados a
laser como o Boford RBS-70 e o SA-19. Outra ameaça são os
telemetros laser
de canhões antiaéreos, radares laser (LADAR), sensores de
busca IRST ou casulos
designadores laser.
Outra ameaça laser que não é dada
importância são os laser usados para cegar
o piloto. Os laser usados em telemetros, IRST e designadores laser
podem
ter a energia aumentada e atuar numa frequência que danificaria o
olho humano,
pelo menos temporariamente, e o LWR daria alerta ao piloto para tomar
medidas
preventivas como usar a fuselagem para esconder o laser ou usar uma
viseira
com filtro laser.
O AMX poderá ter está capacidade ofensiva improvisada com
o laser
do casulo de navegação e ataque, podendo ser usado contra
alvos em terra
e no ar como defesas antiaéreas e caças inimigos.

O protótipo do A-1M tem
quatro antenas do MAWS da Elisra (PAWS). Duas estão abaixo da cabina e duas
na traseira. É o mesmo sistema visível no F-16I israelense.

Um F-5A sul vietnamita
atingido por um SA-7. O piloto ainda conseguiu voar 80km com um motor
funcionando.

O canopi do AMX tem
um bom potencial para redução de assinatura com a aplicação
de uma película metálica. Na falta de tecnologia similar
a da
OTAN, poderia ser um cobertura
de plástico igual a dos carros, mas com película de metal
no interior. O vôo
subsônico não gera calor de atrito que derreteria a cobertura
como aconteceria
com caças supersônicos.
Em
2003 foi anunciado que o CTA está desenvolvendo tecnologia de
materiais absorvedores
de radiação eletromagnética (MARE) com
materiais à base de ferrite (óxido de ferro),
partículas de carbono e polímeros
condutores, que são utilizados na preparação de
tintas, borrachas, compósitos
com fibras de carbono e absorvedores híbridos. Foi testado no
AT-26 Xavante.
O projeto MARE já absorveu R$2 milhões em investimentos.
Os materiais absorvedores
de radiação eletromagnética possuem
aplicações nas faixas de freqüência de
30 MHz a 100 GHz.
O MARE do CTA é efetiva
acima de 2GHz e não impede detecção por radares de
500MHz
mais antigos. Mesmo assim é eficaz contra 80-90% dos radares
atuais que operam geralmente de 8 a 12 GHZ
(Banda I/J da OTAN). O
MARE pode diminuir o RCS em até 10dB por metro quadrado ou o
suficiente
para dividir pela metade o alcance de detecção.
Um RCS pequeno como
o do F-117 pode diminuir o envelope de mísseis SAM em 95%.
Próxima Parte: Planejamento de Missão
Voltar ao Sistemas
de Armas
2002-2009
©Sistemas de Armas
Site
criado e mantido por Fábio Castro
Fórum - Dê a sua
opinião sobre os assuntos mostrados no Sistemas de Armas
Assine a lista para receber informações sobre
atualizações e participar das discussões enviando
um email
em branco para sistemasarmas-subscribe@yahoogrupos.com.br