Reconhecimento Tático (REC-TAT)
O último lote de 15 A-1 monoposto e 7 A-1B biposto foram para os dois esquadrões da Base Aérea de Santa Maria/RS. Estes esquadrões são o 3/10 GAv "Esquadrão Centauro" realiza missões de ataque enquanto o 1/10 GAv "Esquadrão Poker" realiza reconhecimento tático (Rec-tat) com os RA-1A e RA-1B. O 1/10 GAv é o esquadrão da FAB especializado em rec-tat.
O esquadrão "Poker" realiza Rec-tac como função primária e mantém a capacidade de ataque, interdição e apoio aéreo aproximado do AMX. As missões são em proveito das operações da FAB e também do EB e MB. Os RA-1 realizam reconhecimento meteorológico, visual, foto e recentemente infravermelho (IR) com um sistema desenvolvido pelo CTA (scanner infra-vermelho - IRLS) ainda em testes.
O RA-1 tem provisão para levar câmeras internas num compartimento abaixo e a esquerda do cockpit. O Pallet III usa câmeras Zeiss de longo alcance, para cobrir alvos de área e sensoriamento remoto. Este mesmo palete pode usar duas câmeras Vintem 360 para baixa altitude. O casulo nacional Gespi é levado no cabide central e leva quatro câmeras Vintemcobrindo a frente, abaixo e os lados da aeronave.
Os AMX italianos levam o casulo holandês Oude Delft repassados do
RF-104G.
Todos os quatro esquadrões italianos de AMX operam em
missões
de reconhecimento e ataque na proporção de70/30 ou 30/70
dependendo
do esquadrão. A AMI pretende adquirir um casulo de
reconhecimento
em tempo real no programa de modernização dos seus AMX.

O casulo Gespi tem este nome devido a indústria paulista com Gespi que o fabrica. As lentes e câmeras são as mesmas usadas no casulo de reconhecimento do RT-26 Xavante.

A FAB recebeu três casulos de reconhecimento da MB que vieram junto com os A-4Ku comprados do Kuwait. Os casulos tinham até fotos da guerra não reveladas quando foram abertos.

Imagem da câmera Vintem 360.

Bolachas do Poker incluindo baixa visibilidade.

A FAB comprou seis casulos Reccelite da Rafael em 2003 para equipar seus RA-1. A diferença entre o Reccelite e o Litening é a antena do datalink abaixo do casulo. A FAB irá usar um datalink próprio. O casulo LOROP da Elop também foi estudado.

Imagem do casulo
Reccelite usado pelos Italianos no Afeganistão.
Reccelite
O casulo RecceLite
da Rafael é baseado
no designador laser Litening tendo 75% de peças em comum e usa a
mesma estrutura
de apoio. O FLIR foi substituído por uma unidade de imagem e um
gravador
de dados. O casulo tem datalink em tempo real e pode ser uma
modernização
de campo do Litening. O casulo custa 30% menos que um sensor LOROP
dedicado.
O RecceLite já foi adquirido (14 casulos) para equipar os
F/A-18 espanhóis
( C.15 ou EF-18A+/B+ ) que também usam o Litening.
A imagem estabilizada em quatro eixo é esférica cobrindo
quase um hemisfério,
com espectro IR e visual simultâneo e funciona a baixa,
média e grande altitude.
Um INS integrado anota a localização da imagem. A imagem
no FLIR pode ser
mostrada no HUD para auxiliar na navegação noturna.
O datalink pode passar os dados para uma estação em terra
em tempo real que
faz identificação e aquisição de alvos
automaticamente e também tem capacidade
de repassar dados, imagens e coordenadas para uma aeronave de ataque
por
datalink. Neste caso o sensor é ideal contra alvos móveis
como blindados
e mísseis SAM móveis. Os sensores de TV CCD e FLIR com
2000 x 2000 pixels são melhores que os sistemas
atuais contra estas ameaças. As imagens também podem ser
armazenadas no gravador
interno de estado sólido com memória flash com capacidade
de duas horas e
meia.
Os modos de busca são em trilha abaixo ou ao lado de um eixo
vertical e mantendo
liberdade para manobrar; modo fixado contra alvos de ponto
operando de modo
semelhante ao Litening; e busca de área cobrindo área ao
redor de um ponto
e usado para localizar alvo e BDA. O FLIR com campo de visão
grande e pequeno
pode realizar detecção, reconhecimento e
identificação de alvos.
Enquanto um scanner IR (IRLS) varre paralelo a trilha de vôo e
não permite
manobrar, o Reccelitte libera a aeronave para manobras e não
precisa voar
parelo ao alvo por muito tempo. Melhorias previstas incluem um IRLS e
outros
sensores óticos. O RecceLite deverá equipar o Eurofighter
Typhoon.

A FAB comprou 6 casulos de reconhecimento RecceLitte (acima) e 10 casulos de navegação e ataque Litening (abaixo) para equipar os A-1M AMX.

Modo de funcionamento do Reccelite.

Imagem do Reccelite tirada de um F/A-18 espanhol.
Missão
As missões de reconhecimento são mais importantes do que se imagina. Na Primeira Guerra Mundial, a aviação de reconhecimento britânica cooperava com exercito e mapeou todo fronte britânico. Isto permitiu a produção de mapas para artilharia. Os bombardeios preliminares deixaram de ser necessários. Em Cambrai, 20 novembro de 1917, 1003 canhões dispararam na zero hora sem alerta. Foram seguidos por 378 tanques, 289 aeronaves e 8 divisões contra posições alemãs. A cooperação terra-ar restaurou a surpresa e precisão no campo de batalha, iniciando o fim da guerra de trincheira.
Com o advento das novas armas guiadas, o problema mais difícil das missões de ataque passou a ser a detecção e identificação dos alvos. Depois de identificados a destruição do alvo passou a ser o trabalho mais fácil.
Não adianta muito melhorar o poder de combate se não se sabe onde atacar. A arma mais precisa não tem utilidade se acertar o alvo errado. A inteligência precisa é a chave para empregar uma força letal.
Até os EUA estão sofrendo com a falta de meios para realizar a missão como aconteceu na Bósnia, Kosovo e Afeganistão, após a retirada de serviço dos RF-4E da USAF, e apesar do uso intenso de aeronaves não tripuladas (UAV) para coleta de imagens (IMINT em inglês).
Durante a Guerra do Golfo só havia 18 caças de reconhecimento da USAF e 12 da US Navy, mais os Jaguar GR1 da RAF e os Mirage F1CR franceses. Os U-2R foram usados para reconhecimento do campo de batalha. Os satélites de reconhecimento fotográficos KH-11 sofreram com o mal tempo e as imagens levavam uma semana para serem disponibilizadas. Os Lacrosse nem sempre estavam disponíveis na hora desejada. O resultado foi que os pilotos voavam com fotos velhas do alvo, tiradas a mais de 36 horas, e sem utilidade prática.
Sempre que possível, um piloto de ataque voa com uma foto do alvo tirada a pelo menos 24 horas, principalmente contra alvos planejados. Na Segunda Guerrra do Golfo os pilotos americanos voavam com fotos tiradas a algumas horas antes do ataque e tinham as coordenadas precisas do alvo. Em quatro semanas os UAV, satélites e aeronaves de reconhecimento produziram 42 mil fotos.
As missões de reconhecimento tático não tem o "glamour" das missões de ataque e muito menos das missões de caça, mas sem elas as missões de ataque ficam muito difíceis, assim como a coordenação de uma campanha aérea e terrestre.
A inteligência de imagem (IMINT em inglês) é uma tarefa importante para o planejamento de missões de ataque. Algumas missões como apoio aéreo aproximado (CAS) e reconhecimento armado não tem esta necessidade. Os dados de inteligência devem ser tão precisos quanto as armas para funcionar direito. O IMINT é um deles.
Outra missão do rec-tat é a avaliação de danos de batalha (sigla BDA em inglês), que é considerada mais importante que o reconhecimento antes do ataques. O planejador precisa saber a proporção de dano de uma missão de ataque. Deve ter informações para saber se será necessário novo ataque, com mais risco para os pilotos e aeronaves, além de gastos de munição e recursos. Os casulos de designação de alvos tem esta capacidade secundária ao perceber explosão secundária de munição e combustível, além de destroços voando.

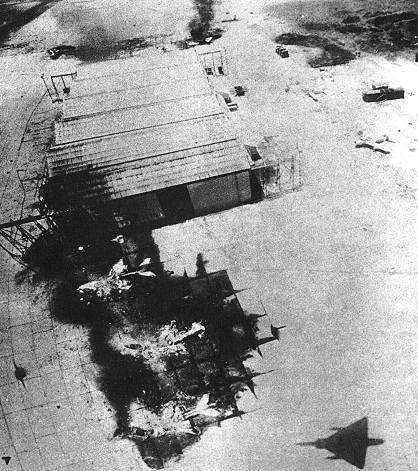
Detalhes de uma foto de BDA do ataque dos F-111 contra a Líbia em 1986 (aeroporto de Benina).
Um Mirage III israelense (sombra no canto inferior direito) fotografa o efeito dos ataques contra as bases egípcias em 1967. A asa delta dos alvos sugerem ser Mig-21.
Na análise de fotos de BDA, uma imagem térmica pode mostrar focos de incêndio e menos consumo de energia elétrica. Uma foto pode mostrar mudança de cor devido a incêndio, além de fuligem e fumaça, ou colapso da estrutura. As fotos também são necessárias para determinar alvos que não devem ser atacados ("no strike sites"). Sensores eletrônicos podem perceber diminuição de emissão de rádio ou radar de uma base atacada. Informantes locais podem relatar que a instalação foi evacuada.
O BDA é crítico pois um piloto e planejadores tem que saber se atingiram o objetivo e se terão que se arriscar no mesmo alvo novamente. As operações em Kosovo mostraram que a localização e identificação de alvos e BDA são os três aspectos mais importantes e desafiadores de uma campanha aérea.
Durante a operação Cruzex 2002, as aeronaves de reconhecimento eram seguidamente derrubadas pela artilharia antiaérea das bases aéreas inimigas enquanto faziam reconhecimento foto a baixa altitude. Uma contramedida seria destruir as defesas, interferência eletrônica ou fazer o reconhecimento a distância. A última opção é claramente a mais barata de todas.
Os sensores eletro-óticos (EO) atuais já tem alcance de pelo menos 70km com boa definição, assim como os radares de abertura sintética (SAR) conseguem tirar fotos com qualidade fotográfica na mesma distância e com mal tempo. Os sensores infra-vermelhos estão alcançando mais de 35km de distância.
Os casulos de rec-tat atuais tem câmeras digitais de banda dupla (visual e IR) e datalink. A qualidade das imagens é bem melhor que os sistemas de UAVs que tem que ser leve e por isso de pior qualidade. Os sensores CCD atuais usam banda de 500 nanômetros (nm) a mais de 900nm, comparado com 500-700 dos filmes revelados e podem penetrar neblina.
Os dados podem ser transmitidos em tempo real ou armazenados em gravadores digitais. Quando o alcance não permite transmissão em tempo real, os dados gravados são transmitidos quando o datalink começa a funcionar. O uso do datalink aumenta probabilidade de completar a missão ou seja, entregar as fotos. As imagens armazenadas em gravadores digitais disponibilizam as fotos mais rapidamente. Estes meios aceleram as missões posteriores de ataque.
Na Guerra do Golfo foram tiradas 4 milhões de frames em 40 dias. Levava pelo menos dois dias para chegarem nas mãos dos comandantes tático e os blindados tomavam as posições inimigas antes de receberem informações para ajudar no planejamento do seu avanço.
Com o aparecimento da capacidade multifuncional nos caças atuais, as missões de reconhecimento tático deixou de ser feita por aparelhos dedicados. Caças multifuncionais e aeronaves de ataque passaram a realizar a missão com casulos especializados, além de cumprir sua missão original. Com um casulo de reconhecimento, um caça pode realizar uma missão quando for preciso, ou ser carregado com outros armas para outras missões.
Outros meios que irão aprimorar as missões de reconhecimento são as miras no capacetes (HMD) para apontar sensores e os RWR que tem capacidade limitada de reconhecimento eletrônico. Os radares laser (LIDAR) são outros sensores de alta resolução que poderão ser usados futuramente.
A experiência OTAN em Kosovo confirmou o que se tornava claro na guerra do Golfo: a munição é meramente um componente de um sistema maior que inclui coleta de inteligência e designação de alvos antes do ataque, seguida de BDA durante e após evento ( ciclo find-fix-track-target-engaje-acess ).
Nos EUA, durante a Guerra Fria havia uma divisão rígida entre a inteligência que apoiava o Comando Nacional com indicação e alerta, e indicação de alvos para apoiar os combatentes com indicação de alvos e consciência da situação. Esta divisão acabou em 1991 e continuou o processo até 2003 no Iraque. O U-2 era foi usado durante a operação Iraq Freedom para encontrar e indicar alvos inimigos e logo depois para avaliação de danos de batalha. Ao mesmo tempo fazia coleta de inteligência para apoiar missões militares.
Os dados de inteligência são usados para preparação de inteligência de campo de batalha, ou tudo que as forças precisam saber antes do conflito e continua durante o conflito com novas informações, correção de ordens e efeitos.
Sensores do Futuro
As aeronaves dedicadas a missão de reconhecimento sempre foram poucas como o Lockheed U-2, Camberra PR.3, PR.7 e PR.9 e SR-71 no ocidente e Mig-25R na Rússia. Também existem aeronaves dedicadas que eram variantes como os Dassalut Mirage IIIR, Mirage IVP e Saab AJSF-37 Viggen. A maioria das aeronaves que realizam rec-tat usam casulos dedicados.
Os casulos atuais são bem mais capazes que os sistemas das gerações anteriores. Podem tirar fotos de longa distancia, com alcance de mais de 75km, de alta resolução e multiespectral. O alvo pode ser varrido de um distancia segura das defesas com a mesma resolução de curta distância. Uma consequência é que o inimigo não é alertado do fato de ser observado, resultando em garantia de surpresa tática.
Com a tecnologia digital atual é possível tirar fotos de dia ou a noite de grande definição, e a longas distâncias. Os sensores com capacidade "stand-off" estão entrando em serviço com o objetivo de aumentar a capacidade de sobrevivência. Estes sensores são conectados a um datalink para enviar as imagens em tempo real e assegurar o sucesso da missão.
O SHARP (Shared Reconnaissance Pod) fabricado pela da Raytheon para a US Navy irá equipar os F/A-18D/E/F e pode ser usado por outros caças. A US Navy pretende comprar 50, sendo 10 na reserva, para substituir os TARPS dos F-14. Foi usado no Iraque em 2003 com os F/A-18E/F do VFA-41 do USS Nimitz.
O SHARP funciona numa altitude de 700 a 17 mil metros (médias e grandes altitudes) e tem alcance de mais 92km. O campo de visão cobre 180 graus. As imagens de alta qualidade produzidas pelas câmera de banda dupla com sensor CA-279 da Recon Optical Inc podem ser mostradas em tempo real para o operar de armas para designação de alvos imediato. Produz imagem stereo ou mono de 25.900km2 em uma hora. Uma camera IR é usada a noite.
O SHARP é equipado com um datalink "Common Datalink" com capacidade de 3GB/s. O casulo SHARP pesa 900kg e tem o tamanho de um tanque de combustível de 330 galões, podendo ser instalado ou retirado em menos de uma hora. Este casulo poderá equipar o F/A-22 no paiol de bombas e no F-35.
O ATARS (Advanced Tactical Airborne Reconnaissance System) equipa os F/A-18C/D da US Navy. É usado para reconhecimento a baixa altitude e pode mostrar dados no cockpit. Custa cerca de US$300mil cada.
O F-14 usa o TARPS (Tactical Airborne Reconnaissance Pod System) desde 1981. O TARPS foi o primeiro casulo com câmeras digitais. Deve ser retirado de serviço a partir de 2003 para priorizar outros programas como o SHARP. A US Navy prefere o F-14 para as missões de reconhecimento por ter alcance maior e ser mais rápido que o F/A-18.

Foto de BDA do TARPS durante a Guerra do Golfo. As pontes eram alvos importantes por serem usadas para passar cabos de energia elétrica e comunicação. O datalink permite que seja feito reconhecimento em tempo real, além do reconhecimento pré-missão e a avaliação de danos de batalha.
A USAF tem 20 casulos TARS (Tactical Airborne Reconnaissance System) que equipam um esquadrão de F-16 operados pela reserva. Os sensores digitais funcionam a média altitude e tem datalink interno. A Força Aérea do Egito comprou seis casulos TARPS para seus F-16 US$45,8 milhões. O contrato inclui duas estações em terra, equipamento de apoio, manuais, pecas de reposição e treinamento. Devem ser entregues em janeiro de 2007.
A RAF está colocou em serviço o casulo digital RAPTOR (Reconnaissance Airborne Pod for TORnado) no Tornado GR.4 em 2002. É produzido pela BF Goodrich dos EUA com ajuda da QinetiQ. Foi usado na Operação Telic no Iraque em 2003 e futuramente será usado no Eurofighter. A RAF encomendou 8 casulos e 2 estações em terra. O RAPTOR usa tecnologia do sistema SYERS do U-2.
O RAPTOR é um sistema de reconhecimento digital de longo alcance e alta resolução para captura de imagem com sensores eletro-óticos diurnos e noturnos com capacidade de transmitir dados por data link em tempo real. A RAF foi a primeira força aérea a usar um sensor com esta capacidade.
O casulo tem 4,5 metros de comprimento e 0,9 metros de diâmetro. Usa uma câmera CCD DB-110 de banda dupla e sensor IR noturno para distâncias médias e curtas. A câmera Goodrich DB-110 significa Dual Band e 110 polegadas de foco máximo. É estabilizada em dois eixos. A estação terrestre ( DLGS - Datalink Groud Station) da QinetiQ pode ser instalado em terra, mar e ar. É compatível com sistemas americanos e da OTAN duas adquiridas pela RAF. O operador de sistemas pode usar a TV da cabine para rever a missão em vôo e congelar imagens para serem capturadas e transmitidas como alvo de oportunidade.
A França desenvolveu o casulo Desire (demonstrador simplificado de reconhecimento ótico) que foi testado no Mirage F-1CR no Iraque em 1997 e Kosovo em 1999. Deste programa surgiu o PRESTO (casulo de reconhecimento stand-off). O PRESTO pesa 550kg e seus sensores tem alcance de 32km com fotos de 10 mil pixels. As fotos são tiradas automaticamente e a aeronave pode manobrar com certa liberdade, não precisando voar paralelo a área alvo. Este recurso é ideal quando o alvo é um rio ou estrada. O casulo tem previsão para levar datalink, câmeras digitais CCD e gravador digital.
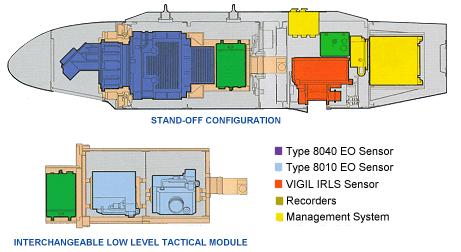
Detalhes internos do casulo Presto.

Outro casulo de reconhecimento francês é o Pod Recon NG (casulo de reconhecimento de nova geração) que entrará em serviço em 2006 no Mirage 2000N e em 2008 o Rafale N (F3 biposto naval). A França pretende adquirir 23 casulos sendo 8 navais e 4 estações em terra (total de US$346 milhões). O casulo tem câmeras CCD com alcance de 50km. Os sensores são biespectral (IR e quase IR) de média altitude que funcionam de dia ou de noite. A resolução é de 1m a 90km de dia ou 45km á noite. Usa também um sensor monoespectral IR de baixa altitude com resolução de 0,15m a 250m altitude. O datalink interno tem alcance 350km e pode transmitir imagens armazenadas no gravador digital. Os sensores podem ser apontado pela mira do capacete do piloto (HMD). Em 2000, a Thales Optronique recebeu um contrato de US$393 milhões para desenvolver o casulo.

No MAKS 2003 foi mostrado o novo casulo M-400 instalado em um SU-30MKK2 chinês. O M-400 pode usar módulos com câmeras LOROP de alcance 70km ou radar SLAR com alcance 100km. Os módulos são intercambiáveis com os dados gravados ou transmitidos por data link. Notar o tanque conformal entre as entradas de ar onde está instalado o M-400. O Flanker também está armado com um míssil Kh-29 e um casulo Sapsan nos cabides sob as entradas de ar.
Os casulos de designação de alvos a laser tem capacidade limitada de reconhecimento ao gravar imagens e fazer BDA. O LANTIRN da US Navy que equipa os F-14 foi equipado com um datalink FTI (Fast Tactical Imagery) para passar dados do casulo para outras aeronaves, estações em terra ou COC de navios. O LANTIRN também tem hardware para Bomb Impact Assessment (BIA), que dá função de reconhecimento limitado.
O WSO pode rever imagens e escolher as que vai enviar em tempo quase real. No modelo anterior o filme tinha que ser revelado após retornar a base para estar disponível e não pode ser datalincado. O FTI do F-14 também passar imagens da tela de radar e TCS para o COC do NAe.
O F-14 foi considerado ideal para rec-tat por poder manter alta velocidade a baixa altitude, longo alcance e por ter dois tripulantes. Voou 781 missões com o casulo TARPS - Tactical Aerial Reconnaissance Pod System na Guerra do Golfo.
Na Guerra do Golfo os F-15E voaram 2.200 missões enquanto os F-16 voaram 13.450 missões. Os F-15E usaram o LANTIRN para fazer reconhecimento e BDA aumentando a capacidade multi-missão da aeronave. O caça tinha que sobrevoar o território inimigo de qualquer forma e aproveitava para tirar algumas fotos. A capacidade de gravar imagem foi motivo para usar o LANTIRN extensivamente posteriormente.
O F-4G e EF-111 realizaram 2500 saídas na Guerra do Golfo em missões de supressão de defesas. Também fizeram localização de alvo e BDA. O reconhecimento tático também inclui reconhecimento visual.
Radares SAR/GMTI
Os casulos com radares de abertura sintética (SAR) estão tendo importância agora devido a experiência da OTAN em Kosovo em 1999. Cerca de 2/3 das missões ar-solo não foram cumpridas devido ao mal tempo. Os radares SAR podem realizar reconhecimento e designar alvos em qualquer tempo, ao contrário dos sensores EO.
A maioria dos radares SAR são montados em aeronaves grandes como o J-STAR e o U-2, mas isto já está mudando.
O SLAR 2000 da Thales, chamado RAPHAEL (Radar de Photographie Aerienne Atectronique) na Força Aérea Francesa, equipa os Mirage F1 desde 1990. O Raphael tem alcance de 100km com definição de 3-6m. Opera em modos de cartografia radar para alvos fixos ou indicação de alvos móveis (MTI) em caso de tropas e veículos. O casulo tem um datalink VHF para transmitir os dados para uma estação em terra.


O radar SLAR Raphael-TH é usado pelo Mirage F-1CT e está sendo substituído pelo Orquide, levado pelo Super Puma. A imagem menor é de uma foto radar.
O radar israelense
EL/M-2060P é instalado num casulo de 550kg e equipa o
F-16. Opera na banda X para longo alcance e qualquer tempo, mas com
menos
resolução que a banda Ku. O alcance é de 150km e
pode coletar imagem de 12
mil milhas quadradas por hora. O casulo tem datalink interno e funciona
no
modo de baixa resolução de grande área (strip area) ou alta resolução de
área pequena (spot area). Outro modo é
identificação de alvos móveis no solo
(GMTI).
O FA-18E/F irá usar o radar interno AN/APG-79 AESA para imagem
radar de alta
resolução. A Thales está desenvolvendo um casulo
com radar SAR para RAF instalar
no Tornado e Eurofighter em 2003.


O radar Norden APG-76 MMRS que equipa os F-4E israelenses é usado para designar alvos para o míssil AGM-142. A primeira foto é uma imagem radar de um navio tanque a 50km de distância com resolução de 0,3m.A segunda foto é de um comboio cruzando uma ponte a 65km de distância com resolução de 18m usando modo GMTI. Os veículos são mostrando-os como retângulos brancos. A terceira imagem é de uma base aérea a 70km de distância com resolução de 3 metros.
Os radares SAR de caça são otimizados para produzir imagem SAR/GMTI de ponto para designação de alvos e gerar imagem de reconhecimento e BDA. também tem outros modos ar-solo e ar-ar. Os radares SAR/GMTI de reconhecimento e vigilância (R-99B) produzem imagens de área a longa distância.
Táticas
O reconhecimento tático consiste basicamente de colocar câmeras e outros sistemas de fotografia em uma aeronave, desde balões do século XIX até aos sistemas atuais. Além destes sistemas, o reconhecimento de imagem IMINT também inclui outras fontes como radar, IR, EO, radar SAR e GMTI.
A observação do campo de batalha de uma posição elevada é um aspecto importante da guerra desde que o homem combate com outro ser humano. Carl Von Clausewitz escreveu no seu livro Da Guerra que "Os pontos altos oferecem três vantagens estratégicas: ponto forte para uso tático, proteção contra acesso, e grande campo de visão...". A ocupação de um ponto alto pode ser considerado um meio de dominação real. Antes dos Chineses (ou brasileiros na guerra do Paraguai) usarem balões para observação, a ocupação de pontos altos era o único meio de um comandante militar ganhar vantagem e ver o que o seu adversário estava fazendo.
A invenção do avião e o seu uso para reconhecimento resultou na multiplicação desta capacidade para níveis inimagináveis em relação a concentração de tropas e localização.
O primeiro uso do avião na guerra foi para reconhecimento durante a Primeira Guerra Mundial. A fotografia aérea foi usada para montar grandes ofensivas. As fotos eram compiladas para montar um campo de batalha. Assim surgiu a "arte e ciência" do reconhecimento aéreo.
Os fundamentos mudaram pouco e ainda confirmam os princípios de Von Clausewitz. Na Segunda Guerra Mundial foi iniciado o uso de aeronaves e cameras para reconhecimento dedicados.
Os mísseis SAM e interceptadores tornaram a tarefa perigosa e mudaram as táticas. Agora empregam aeronaves não tripuladas (UAV) contra alvos importantes e bem defendidos. O avião não foi abandonado. O piloto ainda é necessário para operar sensores. Os caças ainda tem velocidade e agilidade para fugir e defender-se além da capacidade ofensiva. O Piloto pode defender-se o que UAV não pode ainda. A aeronave tem a flexibilidade do piloto que vê coisas que o operador de UAV em terra não pode ver fora do cockpit em tempo real. Os UAV são ideais para missão de paz, onde a perda do piloto não é aceitável.
Antigamente as aeronaves de reconhecimento tático realizam suas missões sozinhas. Agora a doutrina prioriza a capacidade de sobrevivência e uma missão de reconhecimento é feita por pelo menos duas aeronaves e pode incluir escolta de caças e aeronaves de supressão de defesas, estando incluída num "Pacote de Ataque".
No caso de um par, o ala voa atrás e mais alto dando cobertura. Ele avisa em caso de disparo de mísseis SAM e artilharia antiaérea. Os jatos também voam na velocidade máxima.
O planejamento de missão é igual a missão de ataque. A preparação pode durar várias horas e é proporcional a dificuldade da missão. Entre os dados incluem fotos anteriores do alvo. O reconhecimento não é uma missão destrutiva e no lugar de escolher armas, são escolhidos sensores específicos para alvo específicos. Os sistemas de planejamento automático orienta o piloto para voar trilha correta com ajuda do HUD (inclinar asa por exemplo).
Uma missão de reconhecimento pode cobrir de um a dezenas de alvos. Dependerá da distância, tamanho, importância do alvo e defesas. Um alvo sem defesa (mais comum em tempo de paz) é chamado de passivo e os alvos ativos obviamente tem defesas.
De dia e com bom tempo são usados sensores eletro-óticos (EO). Os sensores EO são classificados em LAEO (low altitude) para baixa altitude (até 900m) e alvos de ponto com localização conhecida. Os sensores MAEO são usados em média altitude (900-7.600m com alcance de até 8km) e alvos de área ou sensoriamento. Os sensores HAEO de grande altitude (acima de 7.600m) são usados longe do alvo.
A missão pode cobrir alvos de ponto, área ou varredura linear. Os alvos de áreas são cobertos por mais de uma aeronave ou por sensores MAEO. O alvo não pode ser sem importância como o possível posicionamento de um pelotão. No mínimo é uma ponte ou entroncamento rodoviário.
Uma foto direto sobre alvo geralmente é ruim. Um foto a longa distancia é obliqua e fácil de analisar. Um alvo linear pode ser um rio ou estrada. A aeronave acompanha o trecho ou partes com outras aeronaves cobrindo outras partes.
Os sensores HAEO são preferíveis para alvos bem defendidos ou quando não se pode sobrevoar o alvo. Um exemplo do último caso é fotografar alvos além da fronteira em tempo de paz.
Em tempo de paz é comum usar câmeras LOROP ( foto obliqua de longo alcance - LOng Range Oblique Photography) para vigilância de fronteira. A FAB usa os R-35 Learjet nesta função. Esta missão também pode ser realizadas por caças. Um dos motivos podem ser as defesas inimigas. Em 17 de setembro de 1971, um KC-97 Stratotanker israelense com câmeras LOROP foi derrubado no Sinai por um míssil SA-2 do Egito. Esta missão passou a ser feito com RF-4E Phanton para aumentar a capacidade de sobrevivência.
Junto com um datalink, um casulo LOROP significa segurança, rapidez e eficácia. Qualquer aeronave pode tirar fotografias de alvos bem defendidos sem se arriscar e disponibilizar as imagens quase que imediatamente para os interessados. Os radares SAR/GMTI também tem esta capacidade.
Os sensores de longo alcance são necessários pois um um alvo bem defendido que será atacado por uma arma de longo alcance precisa ser fotografado por um sensor de longo alcance.
Fotos de longo alcance e do alto são consideradas reconhecimento estratégico. O Mirage IV francês realiza esta missão voando alvo e supersônico. Alguns exemplos de casulos LOROP no mercado são o AA-3-38 HAROLD da Dassault e o casulo LOROP da ELOP israelense.

Imagem tirada a 35 km do casulo Electro-Optic Long Range Oblique Photography (EO/IR LOROP) da ELOP. Pode ser usados de altitudes de 20 a 50 mil pés, detectando alvos a mais de 100km, no espectro visual e IR, transmitindo dados em tempo real. Está em uso nos RF-4C e F-16 da Força Aérea de Israel.
As cameras LOROP equivalente as imagens de satélite, mas sem a escravidão das órbitas. A Itália planeja um casulo LOROP para equipar seus AMX. O AMX tem um compartimento interno para sensores LOROP.
A noite são usados scanners infravermelhos (IRLS). O IRLS também enxerga sobre nuvens finas. Ele detecta calor e também vê a memória do alvo. Por exemplo, uma aeronave que se moveu e deixa sombra quente ou fria. Obviamente também pode ser usada de dia. Funciona melhor a baixa altitude, mas os modelos atuais já funcionam a média altitude/distância. Os sensores EO podem ser usados a noite com ajuda de flares para iluminar o alvo.
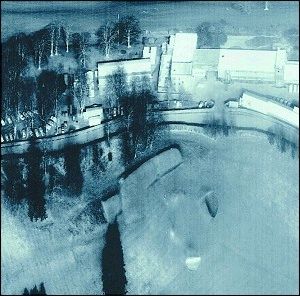
Imagem de um IRLS da RAF.
Os radares SAR podem
tirar fotos
radar com qualidade fotográfica em qualquer tempo. Pode ser
levado em casulo,
internamente apontado para a lateral (SLAR) ou pode ser um modo do
radar
principal. Pode usar modos GMTI para detectar alvos móveis no
solo.
O radar SCP-1 terá modos SAR e MTI, sendo que o último
pode ser últimos em
missões de reconhecimento armado. Nos modos SAR o piloto pode
escolher o
submodo "spot map" com muito detalhes (qualidade fotográfica) ou
"strip map"
com pouco detalhe de área maior.
Uma imagem tridimensional do campo de batalha ou área do alvo
é necessária
para sistemas de navegação por terreno (DTS) ou para
planejar ataques de
armas guiadas. As imagens podem ser geradas por outros meios como
câmeras
LOROP, satélites e radares SAR.
O reconhecimento tem que ser realizado durante as 24 horas do dia e a
aeronave
também deve estar equipada com NVG, FLIR, e outros sistemas para
vôo noturno.
As táticas defensivas das aeronaves mudam com a tecnologia e
regras de engajamento.
Os Etandart IV franceses visitavam até 50 alvos nas
operações Deny Flight
sobre a Bósnia em 1995. Eles vigiavam lugares suspeitos de
esconder tropas
da Bósnia. Este número diminuiu para menos de 10 alvos
após um caça ser atingido
por um míssil SA-7. As aeronaves voavam a 1500m de altura. Uma
regra é não
visitar alvos duas veses na mesma missão, porém, um alvo
grande precisa de
várias passadas.
Os Harrier da RAF
cobriam em média 18 alvos durante nas zonas de exclusão
aérea no norte do Iraque e voavam aos pares. Eram as
únicas aeronaves a entrarem nos "kill box" dos mísseis
SAM iraquianos. Os F-4G de SEAD e os F-15C de escolta eram proibidos de
acompanhar por ser muito perigoso.
Na Guerra do Vietnã, os RF-101 Voodo da USAF cobriam entre 1 a
25 alvos por
saída. Cada saída durava cerca de 3 horas e meia. A maior
parte do tempo
a aeronave voava baixo. A aproximação do alvo era a baixa
altitude baixo
e subia para fotografar (manobra tipo pop-up). Já em Kosovo, os
AMX da Itália
em missões de reconhecimento voavam alto e mergulhavam sobre o
alvo para
fotografar. Subiam rapidamente logo depois para sair do alcance das
defesas
em terra, principalmente mísseis portáteis guiados por IR
e artilharia antiaérea.
Os AMX voavam aos pares com o ala dando cobertura.
A USAF retirou seus RF-4 de operação na década de
90 para missões de reconhecimento
foto. Estas missões passaram a serem feitas por aeronaves
não tripuladas
(UAV) para diminuir a exposição dos pilotos. A
experiência não foi muito
boa e voltaram a usar F-16 equipados com casulos. Nos treinos, os F-16
da
USAF cobrem entre 5 a 10 alvos e dão prioridade para BDA.
Os RF-4E da USAF tinham uma suíte completa de sensores de
reconhecimento
que incluía IRLS, câmeras diurnas LAEO, MAEO e LOROP, radar
SLAR, provisão
para sensores de reconhecimento eletrônico (ELINT), radar com
capacidade
de seguimento do terreno e mapeamento do terreno, provisão para
casulo de
designação de alvos (Pave Spike) e tinha um par de olhos
extras adicional
para reconhecimento visual. É melhor dois olhos para ver algo
que não foi
pego pelos sensores ou não foi coberto. Numa missão comum
o RF-4 cobria três
alvos.
Durante a Guerra do
Vietnã,
os RF-4C realizavam missões de reconhecimento principalmente em
apoio
as operações do US Army que tinha urgência de
informações.
O varredor IR realizava busca a noite e via coisas que as fotos
não
mostravam. O SLAR era bom para mal tempo. O vôo baixo as vezes
era
necessário devido as nuvens. Voava com escolta dependendo da
ameaça.
A única defesa era o evitamento de ameaça. Mais da metade
das
missões eram voadas a noite. Era mais seguro.
O RF-4 substituiu o RF-101A Voodo, mas a velocidade e o alcance do
último
era bastante apreciada e melhor que a do RF-4. A US Navy continuou a
usar
o F-14 com o casulo TARPS e agora está introduzindo o F/A-18F na
missão com
o casulo SHARP. O USMC usa o F/A-18D biposto com sistema ATARS. Apenas
os
Hornet biposto fazem reconhecimento e controle aéreo
avançado.
Capacidade dos sensores
Detecção = natureza do objeto (ex. aeronave)
Resolução Capacidade
2 metro
Reconhecimento de 50% dos equipamentos militares
1 metro
Detecção de 100% dos equipamentos militares
Identificação de 100% de infra-estrutura militares0,8 metro
Identificação de todos tipos de aeronaves
Identificação de todos navios
Reconhecimento de blindados0,5 metro
Reconhecimento de 100% dos equipamentos militares
0,3 metro
Identificação de veículos (blindados, caminhões, etc)
Identificação de todos sistemas de armas (canhão de um blindado)
Detecção e identificação de colunas de refugiados e direção
0,2 metro
Discriminação entre objetos e pessoas
Contar pessoas numa multidão
0,15 metro
Discriminação entre homem e mulher.
Reconhecimento = classe do objeto (ex. caça)
Identificação = tipo do objeto (ex. Mig29)
Reconhecimento Eletrônico
Outra missão realizada pelas aeronaves de rec-tat é o reconhecimento eletrônico (ELINT). Esta missão não é realizado no 1/10 GAv. O ELINT tático difere do estratégico por estar limitado a detectar e localizar ameaças de mísseis SAM e artilharia antiaérea guiada por radar para proveito imediato das missões táticas. Enquanto o ELINT tático é uma missão de reconhecimento, o Elint estratégico é uma missão de vigilância e inteligência, apesar da mesma aeronave poder cumprir as duas tarefas.
Um dos poucos sistemas ELINT/ESM disponíveis para caças táticos é o casulo francês ASTAC. O ASTAC (Anayseur de Signeaux Tactiques - Analizador de sinais táticos) é um casulo de reconhecimento eletrônico que pode ser levado por diversas plataformas. Também tem versão interna para aeronave de transporte, helicóptero ou caça, ou em estação terrestre.
O ASTAC monitora o ambiente para reconhecimento eletrônico de uma área de interesse. É capaz de detectar, analisar os parâmetros de emissão, fazer identificação em tempo real e localizar emissões de radares. Pode até identificar radares que realizam salto de frequência.
O sistema recebe e mede parâmetros de todos os tipos de emissões de radares de vigilância, de aquisição de alvos, de detecção aérea avançada (AEW) e de interferidores (jammers).
Pode detectar 400 radares por hora de vôo nas bandas "A" a "K" e frequência de rádio de HF até SHF(faixa K). Determina a direção da ameaça com precisão menor que 1 grau. Uma estação em terra pode identificar alvos a quase 200km voando a 6.100m e velocidade de 360km/h.
Num vôo de demonstração num F-16B, o ASTAC detectou, identificou e rastreou nove fragatas manobrando numa área de 50x50km a 170km distancia num período de 55 minutos.
O casulo constrói um banco de dados monitorando modos de radares inimigos e grava padrões para análise em estação em terra. Os dados são usados para criar um quadro eletrônico da área e atualizar a ordem de batalha eletrônica do inimigo (EOB). Os dados podem ser usados para atualizar sistemas de autodefesa e alerta radar.
O sistema é desejável para reconhecimento de emissões a média e altas altitudes a grande distância em aeronaves de transporte, ou a baixa altitude para penetração no campo de batalha, para coletar dados para evitamento ou destruição de defesas antiaéreas. Voando em aeronaves de caça é possível penetrar as defesas para forçar sua ativação e com uma capacidade de defesa que não é possível com aeronaves de transporte.
Também pode fazer designação de alvos em tempo real para mísseis anti-radar ou passar os dados por datalink para outras aeronaves de ataque.
O ASTAC pode ser instalado em praticamente qualquer aeronave. Na França, os Mirage F.1CR equipados com o casulo fazem uma corrida no local suspeito e gravam as transmissões dos radares ligados durante a trajetórias. Também equipa aeronaves maiores como o C-160 Gabriel (SIGINT estratégico).
Também é usado nos RF-4E do Japão, equipa os Mirage 2000-5 de Taiwan (quatro casulos) e voa nos F-4E, Mirage 2000 e F-16 da Grécia. Já foi usado na Bósnia e em Kosovo com sucesso e mostrou ser útil na identificação de posições de mísseis SAM inimigos.

O casulo de SIGINT da Thales (ex Tompson-CST) ASTAC pesa 400kg e tem 4,1m de comprimento. O sistema de resfriamento interno precisa de 2kVA. A França também oferece o Thales TMV D18 Syrel de ELINT.

Detalhes do ASTAC.
O sistema ASTAC inclui estação terrestre para planejamento de missão e reconstituição que pode ser fixa ou móvel.
Os russos podem fornecer sistemas que eram usados pelo Su-24 de guerra eletrônica e Mig-25BM de supressão de defesa. O casulo LO-81 fantasmagoria B realiza ELINT e detecta alvos para validar o lançamento de mísseis anti-radiação. O casulo EFIR-1M RADINT (Eter) tem 3 metros de comprimento e grava dados mas também pode transmitir para um posto de comando por data link. O pequeno casulo Tangazh (Pitch) realiza SIGINT.
Complemento
O AMX é um dos meios da FAB para reconhecimento, planejamento e
BDA. Outras
aeronaves são o R-99B, O P-3BR, ALX e o R-35 Learjet, nem todos
operacionais
ainda. O R-35 Learjet tem câmeras LOROP e radar SLAR e três aeronaves estão
sendo modernizados com um sistema SIGINT Thales
DR3000 AMK2-B.
O EMB-145SA ou R-99B SR ("Remote Sensing") para a FAB será o
equivalente
ao R-99A AEW, só que será usado para localizar alvos no
solo. Também terá
capacidade de realizar reconhecimento eletrônico (ELINT) e de
comunicações
(COMINT). Entre as capacidades adicionais está a capacidade de
realizar Comando
e Controle e busca e salvamento.
O R-99B é equipado com um radar SAR da McDonald-Dettwiler, um
scanner multiespectral
EPS-A 31T da Geophisical and Enviromental Research capaz de varrer
trechos
inteiros do terreno e determinar o tipo de vegetação. Os
sensores ótico infravermelho
inclui um FLIR AN/AAQ-22 Star Sapphire e duas câmeras TV com objetiva e
zoom.
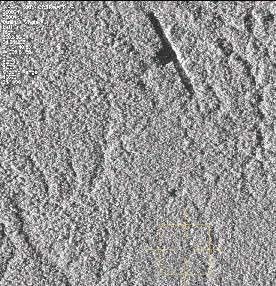
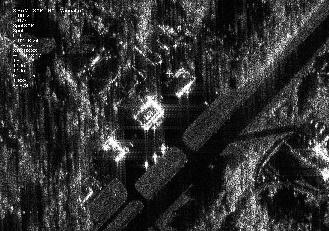
Fotos radar do R-99B
tiradas a grande altitude e longa distância. A foto da esquerda
mostra uma pista clandestina
e a da direita mostra a base aérea de Manaus com algumas
aeronaves estacionadas no pátio.
O AT-29 Super Tucano será usado para reconhecimento visual e
vigilância.
As aeronaves de controle aéreo avançado como o O-1 Bird
Dog, O-2 Skymaster
e OV-10 Bronco foram retiradas de serviço na USAF e USMC e
substituídas por
UAVs. A experiência em combate mostrou que eram muito
vulneráveis em cenários
de média-alta intensidade. Atualmente usa jatos para a
missão como o A-10,
F-16, F/A-18 e F-14.
Os UAVs poderão ser um complemento aos AMX e ALX para cumprir
missões mais
arriscadas. Eles voam a 200-300km/h e são muito
vulneráveis. Em cenários
de baixa intensidade o ALX será o nosso UAV tripulado
multimissão por incluir
sensores FLIR e TV que passam dados para outras plataformas ou
estação em
terra. Também levam armamentos como outros UAVs modernos
(Predator).
Satélites de uso
comercial
produzem imagem com resolução de 1-2metros já
estão disponíveis. O Brasil
está lançando uma série de quatro satélites
de sensoriamento remoto em conjunto
com a china (CBERS -satélite sino-brasileiro de recursos
terrestres). A resolução
provável é de 10-20m.
O CBERS 1 foi lançado em outubro de 1999 e teve uma falha em uma
de suas
câmeras, a WFI (Wide Field Imager – Imageador de Largo Campo de
Visada),
em junho de 2000. O CBERS 2 foi lançado em 2002.
O CBERS-1 foi lançado em 1999 e tem gerado imagens sobre
desmatamentos e
queimadas na Amazônia, previsões de safra, planejamento
urbano, cartografia,
hidrologia e geologia.
Eles vão custar US$ 200 milhões e cada país
participa com 50% dos custos.
O CBERS-3 está previsto para ser lançado em 2005 e o
CBERS-4, em 2008.

Foto do satélite Digital Globe da base americana de Al Udeid no Qatar. A partir desta base os EUA lançou seu ataque contra o Iraque.
Os
satélites ficam em órbitas baixas (LEO) a cerca de 837km
terra
e cada órbita dura 90-100min cada. São 16 voltas ao redor
da
terra por dia e fica até 20 min sobre alvo. As órbitas
são
previsíveis e o inimigo pode esconder o que não quer
mostrar.
Os satélites de imagem também são atrapalhados por
mal
tempo e fumaça. O satélite só aponta para ponto
específico
e não espera. É bom para alvo já conhecido. As
aeronaves
e UAV são melhores para sustentar operação e
surpresa.
Próxima parte:
Supressão de Defesas
2002-2004
©Sistemas de Armas
Site criado e
mantido por Fábio
Castro
| Opinião |
Assine o Livro de Visitas
Leia
o Livro de Visitas
Fórum - Dê
a sua opinião sobre os assuntos mostrados no Sistemas de Armas
Assine a lista para receber informações sobre
atualizações
e participar das discussões enviando um email
em branco para sistemasarmas-subscribe@yahoogrupos.com.br