|
IRST - Infrared Search and Track |
Quatro caças F-16 noruegueses estão
atravessando o céu das Ilhas Lofoten, após decolarem para
atenderem a um chamado de interceptação contra alvos indo em
direção à Base Aérea de Andoya. Os F-16 foram
equipados com um IRST AN/AAS-42.
Voando abaixo do nível de formação
de trilhas de condensação (30 mil pés), os pilotos
noruegueses logo detectaram os seis "alvos". Eram caças Su-27 aproximando-se
de frente na mesma altitude, voando um padrão de varredura de caças
tipo "parede de Flanker" e projetando seu grande envelope de busca radar
à frente. Presumivelmente, um grupo de ataque viria logo atrás.
Os F-16 estavam com seus radares desligados
e reduziram a potência do motor para não serem vistos pelos
IRST dos Su-27, que suspeita-se operarem na banda 3-5 m, otimizados para
detectar assinaturas de pós-combustores. Como o sensor AN/AAS-42,
que funciona na banda 8-12 µm detecta a assinatura de fricção
do ar na fuselagem, os F-16 foram capazes de detectar e classificar a aproximação
dos Su-27 antes de serem detectados. Os noruegueses realizaram uma emboscada
furtiva e derrotaram os Su-27 com disparos de AMRAAM no alcance máximo.
Esta demostração gráfica
do potencial oferecido por caças equipados com IRST foi feita pela
Lockheed Martin Tactical Aircraft Systems in Fort Worth, Texas, em cenários
ar-ar simulados. O desempenho cada vez maior dos sensores de imagem térmica
tem permitido que os IRST rivalizem com o radar como o sensor de escolha para
muitas aplicações ar-ar em caças e aeronaves de vigilância.
Ver o que não
pode ser visto é característico da guerra moderna. As armas
atuais conseguem destruir alvos facilmente, no ar ou terra, após detectados
e identificados. O ideal é detectar e localizar inimigo sem ser detectado
no processo. Embora radar seja um sensor efetivo, sua fraqueza fundamental
é precisar de iluminar o alvo com energia. Quando faz isso será
identificado e denunciará sua posição e ainda pode ser
jammeado. Sensores eletro-óticos e por calor não tem estas deficientes
por serem passivos.
O primeiro FLIR foi usado em 1967 durante o a Guerra no Vietnã.
Mostrou ser um sucesso com o calor das tropas e equipamentos inimigos denunciando
sua posição com o calor emitido. O FLIR (Forward Looking InfraRed) virou termo
genérico para um grande conjunto de equipamentos de imagem de calor.
O primeiro FLIR apareceu em 1964 produzido pela Texas Instruments usando experiência
usada nos primeiros varredores IR lineares de casulos de reconhecimento.
O IRST, ou Sistemas de Busca e Rastreio
Infra-Vermelho (Infrared Search and Track) é um sensor passivo, que
usa a fonte de calor emitida pelo alvo para gerar dados para o sistema de
armas de uma aeronave (ou outra plataforma como navio ou bateria antiaérea).
A operação passiva dos IRST
tem a vantagem da ocultação. A vantagem de formar imagem de
alta resolução também ajuda na identificação
visual (VID) a longa distância. A perda de precisão na informação
de alcance pode ser parcialmente superada com a integração
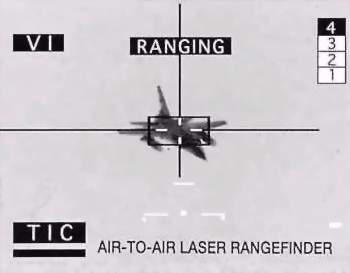
de um telêmetro laser ou com um radar laser (LADAR).
O uso de sensores que detectam calor para
busca de alvos por aeronaves de combate é tão
antigo quanto o uso desses sensores para
guiamento de mísseis. Os primeiros modelos tinham desempenho limitado,
pois não formavam imagem do alvo. Aeronaves da USAF da década
de 50 e 60 como o F-101B Voodoo, F-102
Dagger, F-104 Starfighter, F-106 Delta Dart, F-8 Crusader e F-4B Phantom
já eram equipadas com esses sensores, mas com pouca utilidade prática.
Os IRST eram instalados principalmente em
interceptadores cujos alvos eram bombardeiros Bear e Bison com grande assinatura
IR voando a grande altitude em céu claro e em um cenário frio
no norte do Canadá. Também podiam ser usados para apontar mísseis
guiados por calor como o Sidewinder e Falcon. Por atuar de forma passiva o
IRST daria pouco alerta ao alvo e não poderia jammear o radar. Os bombardeiros
soviéticos tinham interferidores potentes na época.
Os IRST da USAF foram
adotados pela US Navy nos F-4B como sensor AAA-4 IRST montado no nariz para
apontar o AIM-9B. Foram retirados nas versões posteriores usadas para
superioridade aérea e ataque.
O F-4C era equipado com um detetor IR Hughes
S-71N (AN/AAR-4) sob o radome do radar, mas que foi substituído por
uma antena de alerta radar nos modelos F-4D. O JAS-35F Draken sueco também
foi equipado com o AAR-4 na década de 60.

Um sensor IR AAS-15 foi
instalado na maioria dos F8U-2N Crusader a partir de 1960, aparecendo como
um chifre à frente do cockpit da aeronave.

Os russos tem uma
história mais longa e consistente de uso de IRST. Os russos copiaram os
IRST americanos e instalaram nos seus MiG-25 e MiG-23 de defesa aérea
a partir da década de 60. O MiG-23 tinha um buscador de calor TP-23, TP-23-1
ou TP-23M (MiG-23ML) sob o nariz capaz de detectar um F-16 ou similar a 35-40
km ou um TP-26 apontado para trás com alcance de 60 km. Os dados são
mostrados no HUD. O TP-26 é usado para apontar mísseis R-60
e R-23T. O MiG-23P com computador digital
e datalink Lazur-23SML tinha capacidade de interceptação completamente
autônoma no inicio da década de 80.
O primeiro IRST
do J-35A do Draken era muito inefetivo e de curto alcance e difere bastante
em formato nas versões posteriores usados no J-35F. O sensor era fabricado
pela Hughes e tinha alcance de 25km. Era apropriado para as regiões
geladas dos países nórdicos.Os primeiros modelos do F-14 Tomcat eram equipados
com um detetor IR AN/ALR-23 móvel sob o nariz, que podia ser apontado
pelo radar ou usado independentemente para varrer áreas não
vigiadas pelo radar. O detetor de Antimoniato de índio era resfriado
por um sistema de criogênio de ciclo Stirling autônomo. Na prática,
o AN/ALR-23 era inefetivo, e foi substituído pelo Northrop AN/AXX-1
Television Camera Set (TCS).
Os pilotos do F-14 Bombcat
perceberam que o FLIR do sensor LANTIRN era mais eficiente para checar alvos
a longa distância que o TCS. O FLIR tem zoom de 4, 10 e 20 vezes e
pode ser apontado 150 graus fora do eixo da aeronave. Com o datalink FTI,
a imagem do FLIR pode ser transmitida a longa distância junto com imagens
do casulo de reconhecimento TARPS e do TCS.
Os primeiros IRST eram simplesmente câmeras
FLIR com um simples sistema de rastreio e pontaria. Os projetos recentes
têm maior capacidade, incluindo um grande volume de busca, aquisição
autônoma de alvos distantes, rastreio acurado de alvos múltiplos,
taxa de aviso de alvos falsos muito baixo em todas as condições,
estimação de distância passiva, qualidade de imagem
similar às câmeras de TV de alta definição, e
integração com outros sensores e armas de bordo.
A capacidade do IRST
varia de acordo com a freqüência de operação. Por
exemplo, operando na banda de 2 microns o sensor só detectará
exatores de foguete, pós-combustor e a cavidade da turbina. Na banda
de 4 microns detecta o já citado e partes quentes da fuselagem e na
banda de 8 microns para todos os citados e até a turbulência.
A diferença entre um FLIR e um IRST
é que o último mostra dados de fontes de calor no mesmo formato
de uma tela de radar podendo informar a distância também se
estiver usando um telemetro laser ou por estimativa. O FLIR é um sensor
de calor que forma imagens a frente para serem mostradas ao piloto e com
uso em navegação e aquisição de alvos num FOV
estreito. Os IRST atuais são capazes de formar imagens de alta resolução
podendo ser usados para aquisição com um FOV estreito e para
identificação visual.
Imagens de um mostrador
de radar do F-8 Crusader mostrando as imagens do IRST.
Os IRST atuais usam tecnologia de arranjo
de foco plano (FPA - Focal Plane
Arrays) que são várias câmeras de imagem térmica
formando um conjunto único. O sistema é mais leve, menor, precisa
de menos resfriamento, é mais confiável e, potencialmente, mais
barato que os sistemas eletromecânicos antigos.
O ASRAAM e AIM-9X foram os primeiros mísseis
ar-ar a empregarem a tecnologia de FPA em um arranjo de 128 x 128 sensores.
As imagens de onda longa com sensores de HgCdTe prometem aumentar o alcance
de detecção. Para aplicações de ondas curtas,
os arranjos de PtSi são outra alternativa. A cabeça de busca
dos mísseis guiados por IIR atuais podem formar uma imagem do alvo.
O míssil francês MICA pode ter seu sensor de busca usado como
IRST sob comando da mira do capacete do piloto ou do radar.
Os principais requerimentos para os IRST
de caças são:
- Busca e rastreio automático da
assinatura IR de aeronaves em vôo a longa distância em um grande
campo de visão e em todos os aspectos (olhando para cima, para baixo,
mesma altitude
e contra ruído de fundo).
- Capacidade e assistência no engajamento
de alvos múltiplos simultâneos e no lançamento de armas
em um ambiente de contramedidas eletrônicas pesado.
- Saída de dados para fusão
de sensores, para aumentar a segurança e confiança, melhorar
a detecção, reduzir ambiguidade, e melhorar o desempenho de
radar, armas e sistemas de guerra eletrônica.
- Mostrar imagens de alta resolução
para identificação visual (VID) de alvos ao piloto.
- Ter um modo de auxílio a pouso
noturno e condições de tempo adversas.
- Ter um modo de navegação
e evitamento de terreno.
- Ter um modo ar-terra para localização
e designação de alvos olhando para baixo.
- Mostrar informações relevantes
e vídeo para apresentação no HUD, HMD e HDD.
- Sensor auxiliar em caso do radar estar
sofrendo interferência.

Um FLIR de Terceira Geração
mostrando um C-141 taxiando a 20 km de distância.
O desempenho de um IRST depende de uma
combinação de fatores. O número máximo de alvos
que podem ser rastreados, simultaneamente, está diretamente relacionado
com a capacidade de processamento. Embora o número real de alvos
verdadeiros no campo de visão do sensor possa ser bem pequeno, uma
grande capacidade de processamento é necessária para assegurar
que ela não será cancelada na presença de "clutter",
como margens de nuvens. Em cada caso, a precisão do rastreio deve
ser otimizada para apoiar funções como trancamento de cabeça
de busca de mísseis ou fusão de sensores.
O alcance de detecção é
a distância em que a assinatura do alvo excede um certo limiar, que
é normalmente determinado como 90-95 % da probabilidade de detecção.
Alguns IRST constroem uma história de rastreio, usando associações
entre várias detecções, antes de declarar o
resultado ao sistema de armas. Esta "declaração de alcance"
deve ser a maior possível para preparar a resposta na forma de lançamento
de armas, lançamento de contramedidas ou manobras de escape.
O campo de visão (Field Of Vision
- FOV) que o usuário selecionou no campo de visão total (Field
Of Regard - FOR) do IRST depende das circunstâncias. Para uma cobertura
máxima, o FOV deve ocupar todo o FOR. Com um valor menor pode-se
reduzir o tempo para completar uma varredura, com uma maior taxa de atualização.
Outra alternativa é permitir o uso de tempo de integração
maior no detetor, com um maior alcance contra um certo alvo. O objetivo
é ter uma taxa de alarme falso de menos de cinco por hora em um FOV
de 30 x 50 graus.
Os IRST são
passivos mas podem ser detectados com varredura laser que detectam o brilho
do filtro IR do sensor. Se o IRST tiver um telemetro laser suas emissões
podem ser detectado por um sistema de alerta laser (Laser Warning Receiver
- LWR). Os sensores infravermelhos são passivos mas podem ser jameados
com um laser potente que satura o sensor e pode até queimá-lo.
Os russos tem a tendência
de usar telêmetros laser como arma anti-pessoal, para danificar
o olhos humano e sensores óticos mais simples. A USAF testou esta capacidade
no programa Compass Hammer propondo um traqueador ótico capaz de detectar
o brilho do disparo de canhão e direcionar um potente laser verde
para a fonte para cegar o artilheiro e o sistema de controle de tiro. A Westinghouse
projetou o casulo Advanced Optical CounterMeasures testado no meio da década
de 80 para equipar os B-52 mas não entrou em serviço. A contramedida
contra os laser é usar óculos com várias camadas de
filtro de vários comprimentos de ondas especificas. O óculos
tem que ser usado de forma continua pois o laser visível e invisível
não dão alerta.
TISEO
Um sistema eletro-ótico usado no fim do conflito do Vietnã
foi as TV telescópicas estabilizadas. Um dos motivos foi a necessidade
de identificar aeronaves visualmente antes de disparar armas. As aeronaves
americanas eram grandes e ficavam em desvantagem contra pequenos MiGs vietnamitas
e ainda eram fumaçentos. A próxima geração era
ainda maior com o F-14 e F-15 sendo maior que o F-4. Os americanos ficaram
na situação ridícula de usarem sistemas de armas de longo
alcance e serem forçados a combater a curta distância. A TV
telescópica reverteu esta situação permitindo a identificação
visual além da visão humana.
A primeira câmera de TV telescópica estabilizada a entrar
em operação foi a AN/ASX-1 Target Identification Set Electro-Optical
(TISEO) da Northrop. O TISEO foi resultado do programa Rivet Haste durante
o conflito do Vietnã. O TISEO entrou serviço na década
de 70 na USAF, inicialmente no F-4E e depois seria instalado no F-15 mas foi
cancelado.
A instalação do TISEO no F-15 foi abandonado em 1972. Em
1987 foi iniciado um projeto semelhante chamado "Eagle Eye III" com um sensor
que seria montado na raiz da asa esquerda no mesmo local preparado para levar
o TISEO. O sensor teria 40cm de comprimento e 10cm de diâmetro. As
imagens de TV seriam mostradas na tela de radar. O sensor foi cancelado por
falta de fundos e alguns caças passaram a levar lunetas Leopold acoplada
na estrutura do HUD.
O TISEO foi instalado nos últimos F-4E de produção
e retrofitado nos modelos mais antigos. As imagens são mostradas na
tela de radar do WSO. O TISEO pode ser apontado pelo radar APQ-120 e com uma
modernização podia ser apontada pelo sistema de navegação
para apontar em pontos no solo. Foi empregado no fim do conflito do Vietnã
com sucesso. Os F-4E iranianos equipados com o TISEO usavam o Combate Tree
e o TISEO para detectar, identificar e atacar os MiG-21 iraquianos a longa
distância com mísseis Sparrow.
Em testes no deserto, as táticas de penetração dos
F-111 foram questionadas depois que estas aeronaves eram facilmente detectadas,
identificadas e “derrubadas” a longa distância por MiGs simulados por
caças F-4E equipados com o TISEO.

O TISEO é instalado
na raiz da asa esquerda do F-4E.

Foto de uma imagem de um TISEO
feita a partir de um F-4E iraniano mostrando um MiG-23 iraquiano no momento
em que um AIM-54 Phoenix detona ao seu lado. O combate ocorreu em 25 de setembro
de 1980 com o míssil sendo disparado pelo Major Naghdi. O F-14A estava
voando a 6.000 metros e a 8km do MiG-23 quando o Phoenix foi disparado com
o MiG se aproximando e manobrando violentamente. No mesmo combate um Phantom
II derrubou um MiG-23 com um Sparrow disparado a 5km de distância. Os
pilotos iranianos gostavam do TISEO do F-4E com excelentes resultado e esperavam
receber o AN/AX-1 TCS nos seus F-14 mas a revolução impediu
a instalação que seria feita após as aeronaves serem
recebidas.
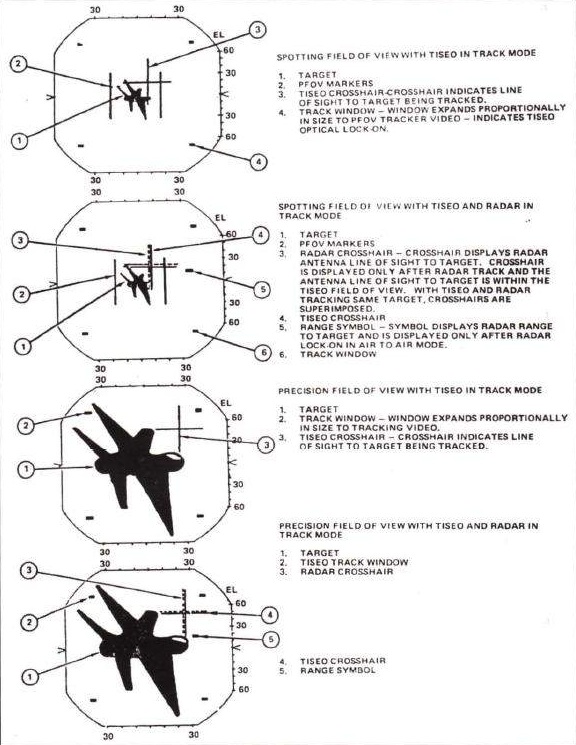
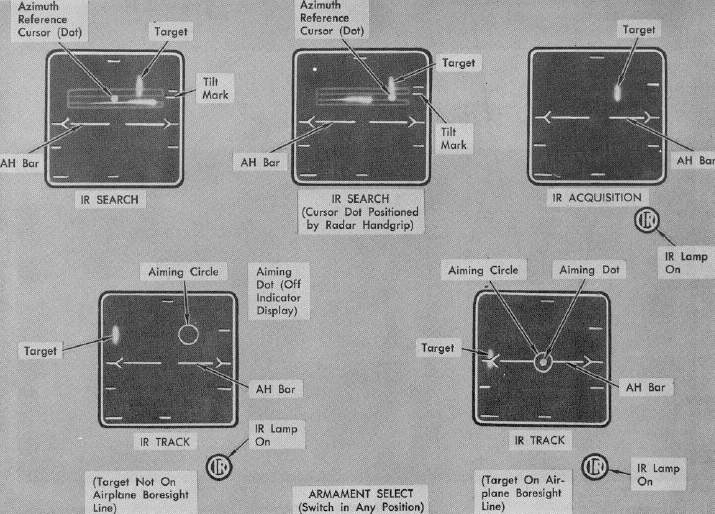
Modos de operação do TISEO.
Os F-4E receberam o TISEO como parte da modernização AN/ARN-101(V).
AN/AXX-1 Television Camera
Set (TCS)
O TISEO foi modificado pela US Navy como TVSU (Television Sight Unit) e
testado entre 1977 a 1978 com grande sucesso. A Northrop foi contratada
para adapta-lo para uso naval e virou o AN/AXX-1 Television Camera Set (TCS).
O TVSU foi usado
na segunda fase dos exercícios ACEVAL e mostrou a importância
do TVSU que equipava os F-14 em 185 mísseis disparados eletronicamente.
O TVSU permitiu a identificação visual a longa distancia em
175 destes disparos. Os primeiro TCS foram incorporados nos F-14 Block 125
no início da década de 80.
O TCS consiste de uma câmera
de TV estabilizada de alta resolução de campo de visão
(FOV) largo de 1,42 graus para busca e outro com zoom de 0,44 graus para
identificação de alvos. As imagens aparecem logo acima da tela
de radar do piloto e no painel do WSO. O TCS varre uma área 15 graus
para cada lado do eixo da aeronave podendo ser apontado pelo radar (AWG-9
ou APG-71), pelo IRST do F-14D, de forma independente ou manualmente
pelo WSO. Os eletrônicos têm algoritmo para acompanhamento automático
do alvo o que aumenta a capacidade de contra contramedidas eletrônicas
do radar que não vai se desviar do alvo. Aeronaves fazendo manobras
"bemaning" são acompanhados facilmente.
O TCS é usado para localizar
um inimigo visualmente a longa distância e identificá-lo, evitando
fogo amigo. O TCS permite inspecionar alvos a longa distância antes
de engajar, pelo menos de dia e com bom tempo. O TCS não tem o alcance
do radar, mas ajuda em muito na identificação o que é
importante quando as regras de engajamento especifica que é necessário
identificar visualmente o alvo antes de disparar. O TCS permite ganhar segundos
cruciais no combate. O TCS, e o TISEO, permite identificar um caça
F-5 a cerca de 18km, um C-130 a 60km, um F-111 a 70km, um DC-10 a 135km.
Um exemplo prático do uso do
TCS é o uso do radar AWG-9 para detectar um Tu-22 Backfire e aponta
o TCS com o radar. A aeronave é identificada a longa distância
e o F-14 inicia o ataque com mísseis Sparrow iluminando o alvo com
o radar. O Tu-22 reage com seus potentes interferidores e o radar do F-14
perde o traqueamento do alvo, mas o TCS ainda mantém o radar apontado
para alvo e continua iluminando o alvo corretamente com um feixe estreito
de radar.
O TCS também é usado
para avaliação de incursão, contra alvos voando muito
perto, e depois do ataque serve para avaliação dos danos de
batalha.
Dependendo das regras
de engajamento o TCS permite fazer identificação visual a uma
distância 3-7 vezes maior que o alcance visual. Ao acompanhar o alvo
o piloto pode observar se esta fazendo manobras ofensivas e defensivas, ou
se está disparando mísseis. As imagens são gravadas para
analise pós vôo.
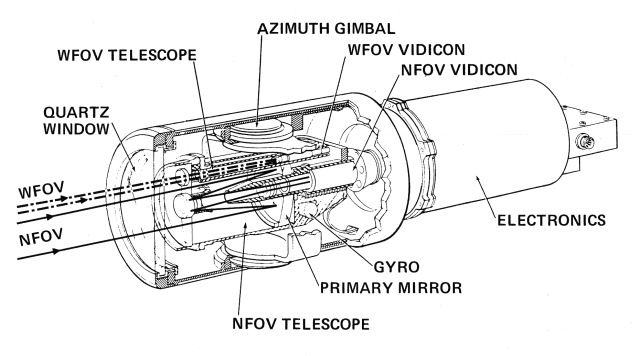
O TCS
usa duas TV vindicon, uma com zoom estreito e outra com zoom largo.

O TCS é formado por dois Weapon Replaceable Assemblies (WRA), o
telescópico e a caixa preta com eletrônicos. As duas câmeras
ficam em uma montagem móvel com o campo de visão de 30 graus
centrado no eixo da aeronave. O sensor move a 30 graus por segundo e estabilizada
a 150 graus por segundos.

No F-14D o TCS foi
instalado junto com o IRST. Originalmente o F-14A tinha o conjunto de detecção
infravermelho AN/ALR-23 no local do TCS mas mostrou ser pouco confiável
e foi substituído pelo TCS. O ALR-23 tinha alcance limitado, com dados
de pouca qualidade e detectava fontes de calor falsas. A tecnologia dos IRST
melhorou com aumento da confiabilidade e maior alcance.

Detalhes da imagem
do TCS com um F-14 como alvo.

Imagem do TCS durante um
combate contra um MiG-23 líbio no Golfo de Sidra em 4 de janeiro de
1989. O TCS é
um sistema de aumento visual que permite identificar um caça pelo tipo
a cerca de 24km.
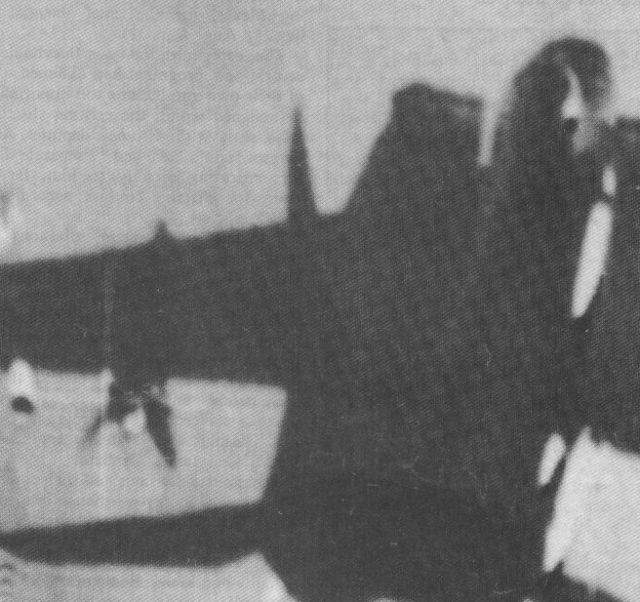
Imagem do TCS de um Tomcat do VF-33 de um de
dois MiG-25PD libios encontrados no dia 24 de março de 1986.

A USAF pretende instalar o AAS-42 em
um casulo para ser usado no F-15 Eagle. O casulo será instalado no
centerline.

A US Navy estuda a instalação do
AAS-42, retirados dos Tomcat, em um tanque central para ser usado pelos
Super Hornet.
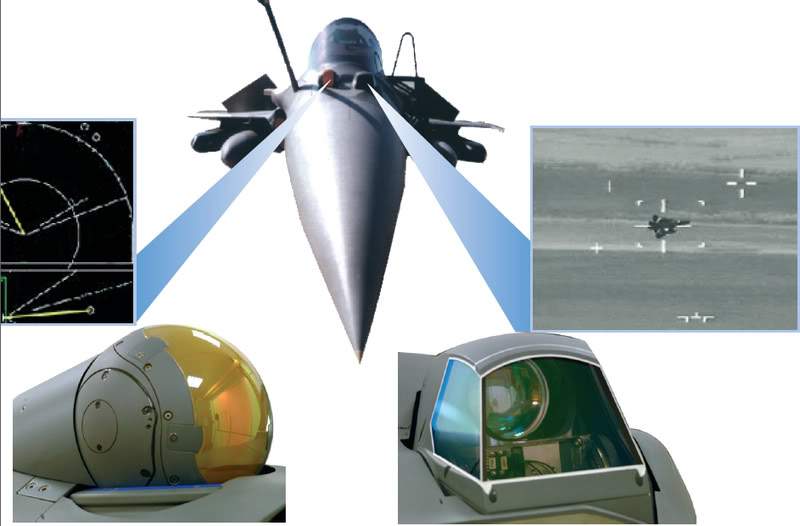
PIRATE
Os projetos de IRST europeus, fora os sistemas
russos, foram liderados pelo consórcio EUROFIRST liderado pela Thales
Optronics do Reino Unido (ex Pilkington-Thorn Optronics), FIAR (Itália)
e TECNOBIT (Espanha). A equipe está desenvolvendo o IRST PIRATE (Passive
Infra-Red Airborne Track Equipment) como complemento do radar do Eurofighter
Typhoon, através de um contrato assinado em 1992. A Thales é responsável pela autoridade
técnica e software, a FIAR é responsável pelo gerenciamento
do programa e contrados além da integração e qualificação
e a Tecnobit é responsável pelo apoio logístico.
O sistema é refrigerado a água
com peso de 60 kg e volume de 45 litros, com consumo de
550 W. O uso de sistemas óticos de
alto desempenho atermalizados, um detetor de imagem infravermelho (IIR) de
segunda geração altamente sensível, que varre na banda
3 a 11 µm em duas bandas (3-5 µm e 8-10 µm), e um
algoritmo avançado com mais de 190.000 linhas de código ADA
permite que o PIRATE detecte partes quentes do exaustor do motor e superfícies
aquecidas pelo atrito com o ar. Ao super-resfriar o sensor, mesmo pequenas
variações de temperatura podem ser detectadas a longa distância.
Embora nenhum limite superior foi definido, a distância de 150 km é
aceita, e a típica é de 50 a 80 km. Nos testes o PIRATE detectou
aeronaves Tornado e MiG-29 a mais de 100km.
A saída de dados pode ser direcionada
para qualquer MFD do cockpit ou HUD. Outras imagens podem ser geradas no
HMD, podendo funcionar como FLIR ou IRST. O uso de técnicas de processamento
aprimoram a saída de dados, melhorando a resolução
da imagem de alvos.
O fabricante afirma que o sistema é
capaz de mostrar imagens de alta resolução para identificação
visual (VID) de alvos ar-ar e ar-superfície, sendo bastante útil
à noite. O sistema usa processamento de sinais derivado do Racal-Thorn
Air Defence Alerting Device (ADAD), que demonstrou uma taxa de supressão
de alarmes falsos muito alta. O PIRATE será integrado com outros
sensores da aeronave para fusão de sensores. Também poderá
localizar alvos voando baixo e mostrar informações de pontaria.
Mais de 200 alvos podem ser rastreados,
simultaneamente, com vários modos:
- Multiple Target Track (MTT) ou rastreio
de alvos múltiplos de alta velocidade (mais de 500, simultaneamente).
O sensor varre um volume determinado do espaço olhando alvos em potencial
com precisão de 0.25 µrad [0.0143 º] em um FOV variavel;
- Single Target Track (STT) ou rastreio
e identificação de alvo único. O sensor faz rastreio
de alta precisão para um alvo único designado. A precisão
é maior que o do radar CAPTOR do Eurofighter;
- Single Target Track Ident (STTI). Realizar
identificação visual (VID) com uma resolução
melhor;
- Sector Acquisition ou modo de aquisição
acoplado. O sensor varre sobre direção de outro sensor, como
o radar ERC-90 CAPTOR, HMD ou RWR;
- Slaved Acquisition. O sensor é
comandado via data link (MIDS) por uma plataforma externa, como uma aeronave
AWACS. Quando um alvo é encontrado, o sensor passa para o modo STT,
automaticamente.
Quando o alvo é rastreado e identificado,
os dados do sensor são usados para pontaria de armas, incluindo ASRAAM,
em grande ângulo de visada.
O uso do PIRATE e MIDS é um método
alternativo de detectar sem emitir com radar. O Eurofighter pode permanecer
mudo com o MIDS e o IRST detectando alvos sem emitir.
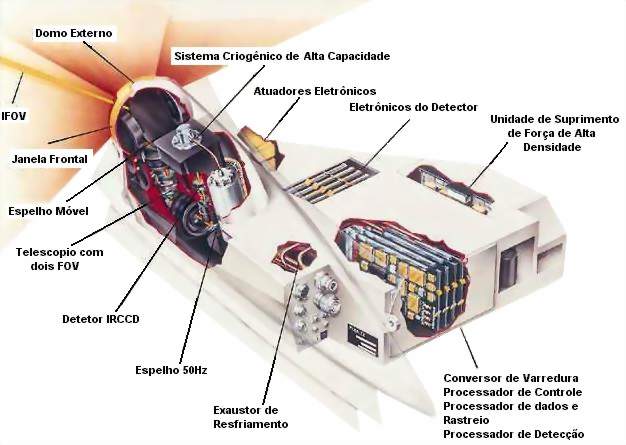
Corte interno do PIRATE.
O sistema usa mais de 50 circuitos integrados. O sensor IIR é estabilizado
para manter o alvo no campo de visão.
O Pirate tem um sistema de campo de visão
dupla para busca de área larga e imagem de alta resolução
de longo alcance, com aplicações para operações
ar-solo, sendo otimizado para busca e rastreio ar-ar, podendo ser usado
como sinalizador térmico para detecção de alvos no solo.
A imagem obtida pela posição à esquerda
do cockpit, com 60 graus para baixo possível, é ideal para missões
ar-terra. A localização lateral limita a efetividade ar-terra
e sensor/designador separado pode ser necessário para operações
ofensivas. O campo de visão não é tão bom quanto
um IRST sob as asas para missões ar-terra, e tem limitação
para avaliação de danos de batalha.
No modo ar-superfície o PIRATE pode
funcionar no auxilio à navegação, seguimento de terreno
a baixa altitude à noite e pouso em mal tempo.
Entre as capacidades adicionais estudadas
que estão sendo examinadas estão seguimento e identificação
multi-espectral, busca e seguimento de alvos no solo, seguimento de alvos
multiplos e integração com com banco de dados de imagem para
aprimorar a navegação e consciência da situação,
alerta de mísseis no setor frontal e alerta de mísseis de
foco ampliado.


Uma versão inicial do PIRATE foi testado no protótipo
DA7 para testes de instalação em 2001. Passou a voar em uma
aeronave Falcon 20D junto com outros instrumentos para testes entre janeiro
a outubro de 2002. Os testes de vôo do PIRATE completo no Eurofighter
iniciaram em junho de 2002 com certificação em agosto de 2003.
Imagens do
PIRATE incluindo o modo FLIR.
Rafale OSF
O segundo maior desenvolvimento de IRST
europeu está sendo feito na França, que pretende equipar o
caça Dassault Rafale com um sistema de busca e rastreio visual e infravermelho,
chamado Optronique Secteur Frontal (OSF). O OSF é o resultado
de seis anos de colaboração entre a Thales (ex Thomson-CSF Optronique)
e a SAGEM-SAT com apoio do ministério de defesa da França (DGA).
O OSF representa um sistema principal do sistema de navegação
e ataque (SNA, Systeme de Navigation et d'Attaque), junto com o sistema
de contramedidas SPECTRA e o radar RBE2.

O sistema OSF está visível na foto, à frente do cockpit.
O sistema tem duas cabeças óticas para detecção
e telemetria simultânea. O sistema inclui uma câmera CCD de
alta resolução,
um FOR largo e um telêmetro laser seguro. O OSF entrou em
oepração no Rafale F2.O OSF é um sistema multifuncional
adaptado ao sistema de controle de tiro do míssil MICA, contudo,
pode ser adaptado a outros sistemas, preenchendo os requerimentos da marinha
e da força aérea francesas.
O sistema de armas do Rafale irá
usar uma variedade de técnicas para determinar funções
de telemetria, rastreio e designação de alvos, incluindo IR
de banda dupla, câmera de CCD-TV de alta resolução e telêmetro
laser de espectro quase IR. A capacidade multifuncional permite que o OSF
desempenhe essas tarefas em paralelo. O sensor é localizado na frente
do canopi do Rafale e terá duas cabeças óticas para
detecção e telemetria simultânea.

Imagem do sensor IR do OSF
do Rafale. A imagem sugere que sejam um Mirage 2000 e outro Rafale.
Telêmetro laser da Thomson-CSF.
 Imagem infravermelha mostrando
a assinatura exagerada do APU no meio da fuselagem do caça Rafale.
Imagem infravermelha mostrando
a assinatura exagerada do APU no meio da fuselagem do caça Rafale.O sistema completo pesa
95kg com um volume de 0,09 m³. Pode funcionar como IRST, FLIR, laser
telêmetro e ser usado para vigilância, rastreio e identificação
visual (VID), com alcance estimado de 80km. O OSF é acoplado com
o radar para VID de alvos aéreos e de superfície.
Em testes, o OSF foi
capaz de detectar e seguir uma aeronave de reabastecimento a partir de 90km
a 6 mil metros de altura. Foi testado no Falcon 20 e estará operacional
em 2004 no Rafale N.
O sensor pode ser usado
em modos ar-superfície e ar-mar, mas um casulo designador será
o sensor preferencial nesta tarefa. No modo ar-solo o sensor IR ou TV pode
mostrar uma imagem em zoom do alvo para auxiliar modos CCIP e aprimorar a
pontaria. O laser também é usado para telemetria e modos CCIP.
O sensor IR pode mostrar imagens nos mostradores da cabine e acompanhar oito
alvos simultaneamente.
 O IRST é instalado a esquerda e um TV/telemetro laser (chamado Combat
Identification Unit - CIU) a direita. O CIU pode acompanhar alvos
e mostra-lo no HUD do piloto.
O IRST é instalado a esquerda e um TV/telemetro laser (chamado Combat
Identification Unit - CIU) a direita. O CIU pode acompanhar alvos
e mostra-lo no HUD do piloto.
Imagem do OSF mostrando uma aeronave comercial a 31km e um Rafale a 50km.

Imagem do OSF mostrando
o pátio de aeronaves da Dassault visto a 34km e um navio a 50km.
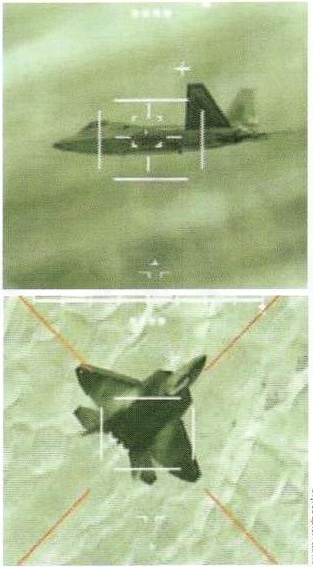
Imagem do OSF durante
um treino de combate aéreo dissimilar contra um F-22 da USAF. O canal usado
é o de TV.
IR-OTIS
Um terceiro desenvolvimento europeu está
sendo feito pela Saab Dynamics na Suécia. O sistema IR-OTIS foi
baseado em um sensor de TV/quase IR testado no JA-37 em 1993-94 e está
planejado para ser instalado no JAS-39 Gripen após o ano 2000. O IR-OTIS
pode operar como IRST com um grande FOV, ou como FLIR com um FOV estreito.
Ele aprimora a consciência da situação de dia e à
noite e mostra dados para o disparo de armas para o sistema de controle de
tiro da aeronave. Também pode ser usado para ataque ao solo e reconhecimento.

IR-OTIS instalado no Gripen.O sistema é capaz de realizar busca
passiva e contra alvos furtivos. É usado no caso do radar estar sendo
interferido, sendo capaz de rastrear alvos múltiplos.
O IR-OTIS será apontado pela mira
no capacete do piloto e pelo radar, ou de fontes externas via data link
como radar no solo e outro caça. O sistema também terá
um programa de busca autônoma e funções de rastreio.
As informações serão armazenadas para avaliação
e comparação com as informações do radar e também
para gerar imagens de vídeo para uso posterior ao vôo.
 O sistema IR-OTIS consiste
no sensor, caixas pretas e mostradores na
cabine como o HUD e MFD.
O sistema IR-OTIS consiste
no sensor, caixas pretas e mostradores na
cabine como o HUD e MFD.O sensor IIR trabalha na banda 8-12 µm,
e inclui uma caixa preta eletrônica montada internamente, sendo um
complemento ao radar do Gripen. O sistema pode ser usado em outros caças,
como o F-16 e o F/A-18.
Desde 1991, a Saab está desenvolvendo e testando um sistema
eletro-ótico de aquisição de alvos chamado OTIS no caça
Viggen. A instalação de testes é um domo igual ao do
Su-27 e MiG-29 à frente do cockpit, instalado mais para a esquerda com
20 cm de diâmetro.
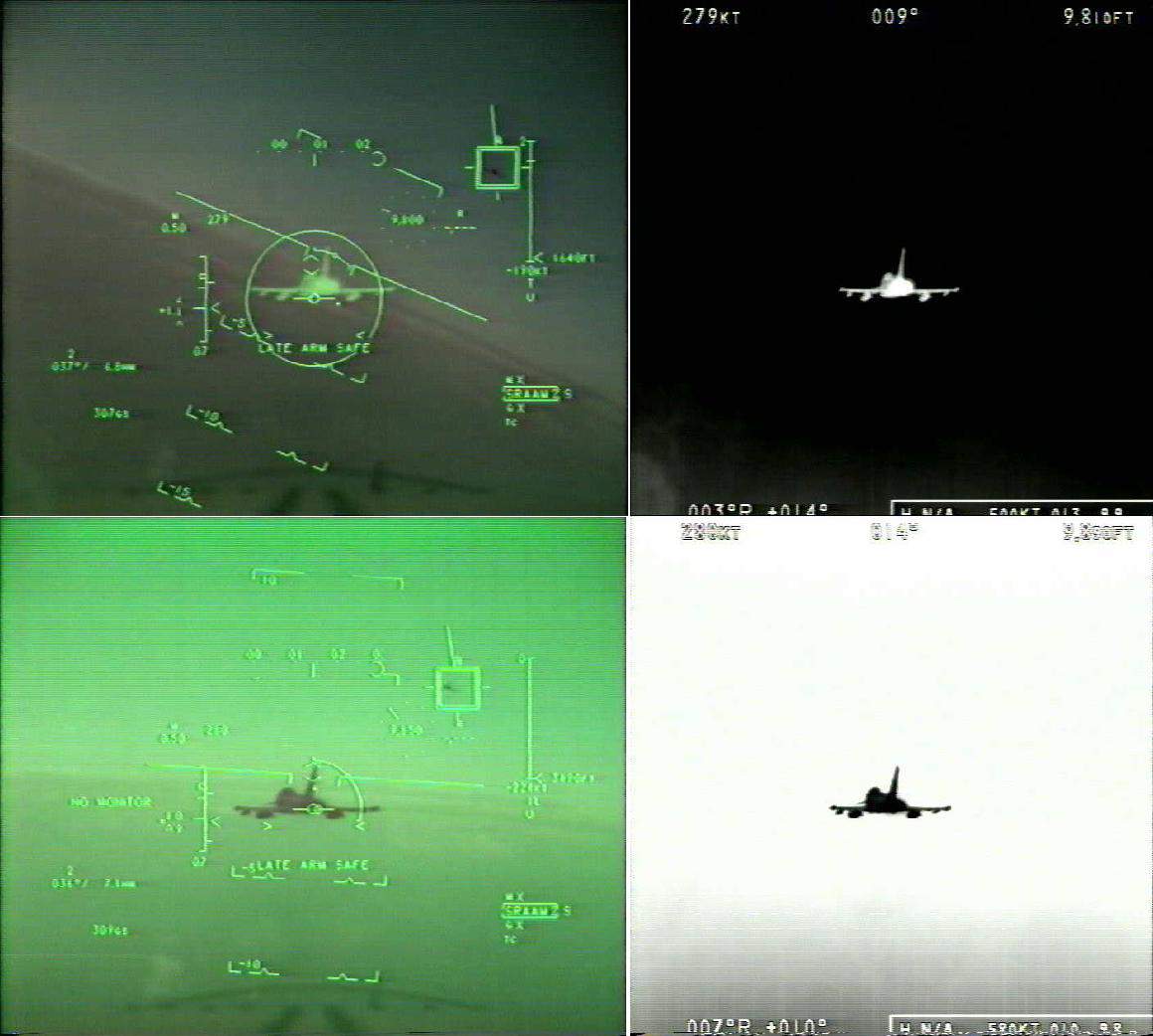
AN/AAS-42 IRST/Shadow
A US Navy (USN) opera dois esquadrões
de caças F-14D equipados com o IRSTs (Infrared Search and Track Set)
AAS-42. A Lockheed Martin Electronics & Missiles (LMEM) entregou 62 unidades
em 1996. O sistema montado sob o nariz pode operar independentemente, ou em
conjunto com outros sensores como o radar AN/APG-71 e o AAX-1 TCS (Television
Camera System ).
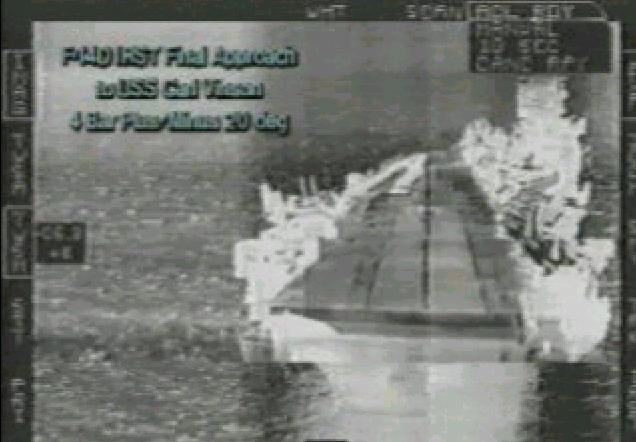
O primeiro uso operacional, a bordo do
USS Carl Vinson, também foi junto com o uso de óculos de visão
noturna no F-14D. De acordo com a Lockheed Martin, o AAS-42 é otimizado
para detectar assinaturas de fricção da fuselagem com o ar a
distâncias de mais de 180 km em ambiente claro sem nuvens, operando
na banda de infravermelho longa (long-wave infrared - LWIR). O uso de LWIR
permite que o IRST detecte alvos em todos os aspectos, ao invés de
ter que se posicionar para ver o brilho do pós-combustor. O sensor
também mostra detecção passiva de alvos com alta resolução
a longa distância em cenários de defesa aérea.
O F-14D é equipado com o AAS-42 montado a lado com o sistema
de TCS de imagem por TV. Os outros modelos da aeronave só tem um ou outro sistema
e não ambos.
A largura de feixe estreito e resistência
à interferência provou ser de alto valor em modos de avaliação
de incursão, mesmo contra alvos em formação cerrada
manobrando agressivamente e lançando contramedidas. Outros usos incluem
detecção passiva de aeronaves de reabastecimento em vôo.
O IRST obteve um tempo entre de falhas (MTBF) de 513 h nos testes iniciais.
O requerimento inicial do AAS-42 especificava
que deveria ser capaz de detectar uma aeronave de ataque marítimo
Tu-22M backfire além do alcance cinemático do míssil
Phoenix lançado pelo F-14. A USN selecionou um IRTS para este papel
por ser passivo e poder funcionar na presença de interferidores poderosos
levados pelos Backfire e suas escoltas.
 Cabeça de busca WRA-1
e modulo de processadores do AAS-42.
Cabeça de busca WRA-1
e modulo de processadores do AAS-42.O AAS-42 que equipa o F-14D opera em seis
modos, varrendo em +/-80 º em azimute e +/-70 º em elevação.
A cabeça de busca WRA-1 é uma parte do hardware do sistema.
O subsistema inclui cabeça de busca estabilizada em três eixos
e processador com algoritimo de filtragem que distingue alvos de ruído
de fundo
O F-14D também pode usar o sensor
para detectar mísseis balísticos de teatro (TBM) durante sua
fase de lançamento. Contra lançadores de TBM, o IRST é
capaz de indicação e rastreio de alvos a longa distância.
Se o ponto de lançamento é
determinado em sete minutos, é possível encontrar e destruir
o lançador. Um F-16 equipado com um casulo AAS-42 no lado direito
da entrada de ar, e com o designador de alvos AN/AAQ-14 LANTIRN no lado esquerdo,
pode detectar um TBM a longa distância, voar naquela direção,
e então detectar e atacar o veículo lançador no solo.
Os F-14D equipados com o LANTIRN e o AAS-42 já têm essa
capacidade.
A USN adquiriu 78 casulos LANTIRN para
equipar 212 F-14A/B/D no ano 2000. O F-14D usa o IRST para navegação
em rota para alvos em terra, e para encontrar e identificar objetos, no
mar e na praia, para serem gravados pelo varredor linear do Tactical Air
Reconnaissance Pod System (TARPS). O F-14D também pode empregar o
LANTIRN e o AAS-42 cooperativamente em modos ar-ar. O IRST detecta alvos
a distâncias longas e aponta o FLIR do LANTIRN para identificação
a 12-16 km.
Outras qualidades do AAS-42:
- Volume de busca aumentado
- Preciso para determinação
de incursão
- Resolução 40 vezes maior
que radar
- Realiza detecção de alvos
de baixo RCS
- Realiza aquisição de alvos
não hostis
- Nega a detecção pelo inimigo
por ser passivo
- Diminui o risco de fogo amigo
- Nega ameaça de mísseis anti-radiação.
- Rastreia alvos a longa distancia, o que
permite "ver primeiro e disparar primeiro"
- Imunidade à interferência
- Emprego de mísseis no alcance máximo
- Determinaçao de local de lançamento
de TBM para ataque posterior
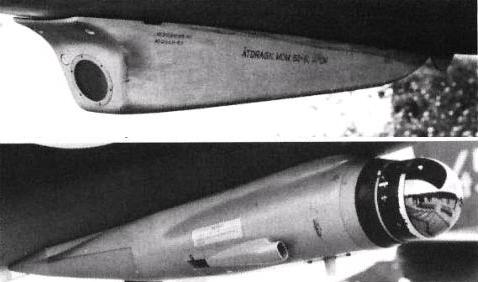
O AAS-42 é oferecido em duas variantes
para exportação. Uma compacta com 19 cm de diâmetro
e 61 cm de comprimento (contra 22,8x91cm do original) para ser instalado
no nariz de aeronaves como o Gripen, e em casulo, conhecido como Shadow,
que evita os gastos com a integração do IRST em várias
plataformas.
O Shadow usa um AAS-42 e o sistema de refrigeração
em um casulo de navegação Pathfinder modificado com 1,36 cm
de comprimento, 25 cm de diâmetro e peso de 86 kg.
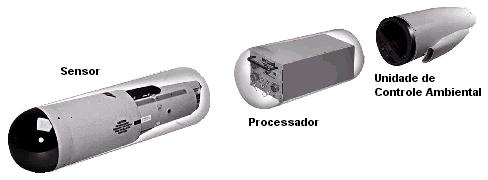
Partes do IRST Shadow em um casulo externo.
AAS-42
Shadow
Interno
Sensor
comprimento cm
61,0 137,1
61,0
diâmetro cm
23,1
24,7 19,5
Processador
Dimensões(cm) 19,0 x 19,3 x 48,0
- 19,0 x 19,3 x 48,0
Peso kg
57,6 103,1
52,4
Potência Kva
<0,8
2,0 <0,8
Imagem do AAS-42 durante o pouso num NAe.
ATF e JSF
A USAF ainda não foi convencida
da utilidade dos IRST, embora já tenha testado o AAS-42 em um F-15
no final da década de 80. A GE Aeroespace e Martin Marietta, que agora
são parte da Lockheed Martin (LMEM), desenvolveram um IRST para o programa
ATF, que se tornou o F-22A Raptor.
O IRST foi cancelado na fase de demonstração/avaliação
(dem/val). A USAF acredita que o radar AN/APG-77 com capacidade LPI
será capaz de preencher todos os seus requerimentos. O espaço,
peso, potência e sistema de resfriamento para o IRST ainda está
na aeronave.
Mesmo assim, a LMEM obteve um contrato
para desenvolver tecnologia para um IRST (AIRST) com potencial de aplicação
no F-22.
A LMEM testou um Advanced IRST (AIRST) para o F-22. A unidade de
sensor (à esquerda) é
protegida por uma janela com características
furtivas (à direita).
O F-35 (JSF) tem um sistema eletro-ótico
chamado Electro-Optical Targeting System (EOTS) agora chamado de Electro-Optical Distributed
Aperture System (EO DAS) e designado AN/AAQ-37. O EO DAS consiste em um TFLIR (Targeting Forward-Looking
Infrared) e um DAS (Distributed Aperture System) projetado pela Northrop Grumman Electronic Systems
e Lockheed Martin Missiles, que também terá funções
de IRST.
O EO DAS é o resultado do estudou
de um sistema multifunção integrado para aeronaves de combate
que combinava um arranjo de sensores IR de abertura distribuída (DAIRS)
realizado pela Naval Air Warfare Center Aircraft Division.
O DAS, consiste de seis sensores FPA (Focal
Plane Array) fixos, com campo de visão de 60x60 graus cada, localizados
ao redor da aeronave atrás de janelas planas e cobrindo um campo
de visão total esférico.
Eles realizam três funções
simultâneas. Mostram imagens no HMD do piloto, mesmo em direções
onde a fuselagem e a asa estariam cobrindo a visão do piloto, incluindo
visão "através do piso", necessário em decolagem vertical,
em partes cobertas pela estrutura da aeronave. O F-35 não precisará
de óculos de visão noturna e o DAS pode ser usado para navegação/FLIR.
Funcionará como sistema de alerta
de mísseis (Missile-Warning System - MWS) detectando a fumaça
de um exaustor de míssil. Como MWS ele determina a direção
da ameaça e o tempo do impacto. Também envia dados para o
software de missão, para identificar o míssil e determinar
qual a melhor contramedida a ser empregada. O sistema dará uma boa
consciência da situação em todas as direções.
Pode ser usado como Situational Awareness
IRST (SAIRST) detectando e rastreando alvos aéreos de alto contraste
IR como uma aeronave.
O TFLIR (Targeting Forward-Looking Infrared)
de terceira geração é um arranjo fixo infravermelho
de média frequência de alto desempenho para formar imagens a
longa distância. O TFLIR terá um telemetro laser, detetor laser,
designador laser, câmera de CCD-TV de alta resolução
e um FLIR de terceira geração.
O TFLIR será levado em um torreta
fixa a frente do trem de pouso dianteiro, cobrindo o hemisfério inferior.
O TFLIR realizará identificação de alvos aéreos
e principalmente terrestres a longa distância, designação
de alvos com o laser e avaliação de danos de batalha.

O TFLIR é instalado em uma janela multifacetada invisível
ao radar que fica instalada na frente do trem de pouso principal. A imagem
permite perceber mais duas janelas do DAS. Uma logo acima do TFLIR no lado
da cabine e outra a frente da cabine e apontada para frente e para cima.

Imagem do TFLIR do
F-35.

Teste do DAS detectando o
disparo de um míssil balístico.
IRST RUSSOS
Os caças russos Su-27 e MiG-29 usam
os sistemas OEPS-27 e OEPS-29, respectivamente, desenvolvidos pelo Urals
Optical-Mechanical Plant (YOM 3). O OEPS têm funções
de detecção e acompanhamento para alvos em quaisquer altitude,
dia ou noite, com ruído de fundo ou presença de interferência
eletrônica.
Os IRST que equipam os MiG-29 e Su-27 estão
totalmente integrados com o sistema de armas da aeronave. Se um alvo é
detectado pelo IRST, esta informação é disponibilizada
para o radar e vice-versa. Um alvo que é obscurecido por nuvens ou
mal tempo impedindo o rastreio pelo IRST é passado automaticamente
para o radar. Os últimos modelos são maiores e com melhor resfriamento
para melhorar o desempenho. Também fazem determinação
de distância para alvos no solo e no ar para disparo de canhão.
O sistema pode ser apontado pela mira no capacete do piloto (HMS). O sensor
tem um sistema de manutenção automático tipo Bite acoplado.

OEPS-29O IRST que equipa os OEPS-27 e OEPS-29 é
um sistema optrônico de detecção ótica/mira por
infravermelho passivo (EOS) 36Sh projetado pelo NPO Geophysica, que está
ligado ao radar e a um telêmetro laser. O IRST faz parte do conjunto
OEPS-27, que também inclui a mira montada no capacete.
O sensor é montado em uma torreta
estabilizada em três eixos e protunde à frente do cockpit do
piloto. O rastreador Infra-Vermelho tem alcance nominal de 18 km contra o
hemisfério traseiro. Melhorias no resfriamento darão ao IRST
um alcance de 30 km com rastreio de TV. O sistema já rastreou um L-39
Albatroz a 50 km de distância em uma demonstração. O IRST
não é capaz de formar imagens e por isso não pode ser
usado para identificar alvos à noite. A razão de rastreio é
de 25 graus/segundo. O campo de
visão é de ±60° em azimute e +60/-15°
em elevação. O campo de visão também tem zoom
de 60° por 10°, 20° por 5° e 3° por 3°.
O EOS ou as cabeças de busca dos
mísseis podem ser acoplados com o designador de alvos montado no
capacete, habilitando o piloto a adquirir alvos, simplesmente, movendo sua
cabeça. O IRST tranca no primeiro alvo que detecta e/ou alvo mais
quente. Os dados podem ser passados para a mira montada no capacete do piloto.
O IRST permite interceptações
passivas, não revelando a posição para o inimigo, sem
que o radar seja ligado e pode ser usado no caso do radar estar sendo interferido
ao ser apontado para a fonte de interferência e serve de backup para
o caso de falha com o radar.

IRST (EOS) 36Sh. A capacidade do MiG-29,
Su-27 e MiG-31 de realizar uma interceptação controlada por
radar em terra e atacar com mísseis e canhão com apoio apenas
do IRST interno torna todos os ECM de caças inimigos inefetivos.
O iluminador a laser tem alcance efetivo
de 8 km com resolução de 1 metro. O laser gera pulsos de 0,1
microssegundos e 30 metros de comprimento Ele causa menos danos à
visão que outros laser com raio de vários quilômetros
de distância. A potência é de 5 Watt em 2-4 pulsos por
segundo.
Se o trancamento for quebrado por nuvem
ou nevoeiro, o radar é ligado, automaticamente, e continua o rastreio.
O laser é 10 vezes mais acurado que o radar para medir a distância
de disparo do canhão. O SU-30MKI indiano usa um IRST mais moderno e
capaz, chamado OLS-30, que também tem TV. O sistema de TV pode detectar
alvos há 10km e identificar alvos numa distância de 6km.
O IRST permite uma interceptação
passiva com a aeronave recebendo informações de sensores em
terra ou de outras aeronaves, através do data link, até que
o sistema detecte o alvo e o sistema de controle de vôo tome conta da
interceptação.

O MiG-31 usa o sistema eletro-ótico KOLS TP-8, que era uma combinação
de IRST e telêmetro laser. A torreta não é retrátil
e sim removível. O sensor sob a parte dianteira da fuselagem é
um meio de detecção adicional. O sensor IR é acoplado
ao radar RP-31 Zaslon (designação SBI-16 de fábrica e
Flash Dance para a OTAN) e realiza vigilância passiva do espaço
aéreo e designação de alvos para os mísseis IR
R-40D e R-60. Os dados alimentam o HUD e o mostrador do operador de sistemas
(WSO). Ele melhora a capacidade em ambiente de ECM pesado. O campo de visão
é de +/-60 em azimute e +6/-13 em vertical. O alcance contra um caça
se afastando sem usar o pós-combustor é de 40km.
Os MiG-21 Indianos que serão modernizados
e receberão um IRST russo de modelo desconhecido. O Su-35BM, o novo membro da
família Flanker, usará um IRST OLS-35/KOLS-35
com canal de TV adicional e sensores mais sensíveis.
Outros Países
O Paquistão está avaliando
um demonstrador de tecnologia de IRST de projeto local. O projeto foi
iniciado em 1992 e testado, inicialmente, em 1994. Foi instalado em um casulo
de 2,4 m de comprimento por 21 cm de diâmetro, pesa 80 kg, e as imagens
são mostradas em um visor de 3,5 kg no cockpit.
Foi testado no Mirage III. O sistema tem
um gravador para análise de missão. Foi testado contra alvos
aéreos, com capacidade multi-alvo. Faz busca em padrão espiral,
26 x 26, horizontal 9,6 x 100, e vertical 100 x 9,6 , sendo que o
piloto escolhe o modo de busca. A função de rastreio
de alvos está disponível e o projeto modular permite ser levado
em outras plataformas como helicópteros.

Casulo IRST paquistanês.

Casulo IRST paquistanês em um FC-17 Thunder.
 Em 1997, o Japão iniciou um programa
de modernização da sua frota de F-15J e entre os novos sistemas
a serem instalados incluía um IRST de projeto local.
Em 1997, o Japão iniciou um programa
de modernização da sua frota de F-15J e entre os novos sistemas
a serem instalados incluía um IRST de projeto local.
Anti-TBM
Em 1996, a Raytheon Systems Company foi
escolhida para demonstrar o SIRST (Surveillance IRST) e validar
um programa de IRST a bordo do E-2C.
O sensor, com uma abertura de 7,5 cm, é
montado em uma cúpula móvel de 38 cm de diâmetro no
nariz da aeronave para dar um FOR de +/- 45 º em azimute e + 55 º
a -10 º em elevação. O SIRST incorpora um focal-plane
array (FPA) de banda dupla, que opera em onda média (3.4-4.8 m) e
onda longa (8.2-9.2 m).
O sensor estabilizado tem um FOV instantâneo
de 87 µrad com 3.2 º em elevação, e 250 Hz de atualização.
O SIRST está integrado com o processador principal do Hawkeye, permitindo
fusão
de sensores com o radar de vigilância.
O SIRST foi projetado para detectar e rastrear
TBM, aeronaves e mísseis cruise em alcances "taticamente úteis",
mostrando informações de rastreio de TBMs para navios equipados
com sistemas de combate AEGIS e baterias terrestres Patriot.
Quando operando contra TBMs, o SIRST irá
rastrear um míssil nas duas bandas durante o lançamento
e empregará ondas longas após a queima do impulsor. Uma busca
típica por mísseis cruise voando baixo por um E-2C a 10 mil
metros também envolve operações de ondas longas, com
o SIRST varrendo em 20 º em azimute e 3.2 º em elevação
para dar cobertura em um arco que se estende a 90-280 km.
O primeiro teste real do SIRST foi realizado
em 2001 pela US Navy, Northrop Grumman e Raytheon.
O SIRST esta planejado para entrar em operação
no Advanced Hawkeye, a próxima geração do E-2C que
ira seguir a produção do Hawkeye 2000.
Os IRST instalados nas aeronaves de vigilância
ou que equipam aeronaves não tripuladas (UAV) podem detectar
e rastrear TBM a longa distância. O processamento dessas operações
é maior que o necessário em aplicações para
caças. Um AAS-42 precisa de 4 GFLOPS para realizar 500 operações
a cada 1,6 milhão de pixels por segundo, enquanto o SIRST (Surveillance
IRST) testado no E-2C precisava de 12,5 GFLOPS para processar 5 milhões
de pixels/s.
Também existe o requerimento para
instalar um IRST/ELRF (eyesafe laser range-finder) que pode equipar outras
plataformas além do E-2C, como UAVs, para detectar e rastrear TBMs
durante a fase de lançamento.
O sensor deve ser capaz de rastrear TBMs
em três dimensões com precisão de 100 m por eixo e detecção
a distâncias maiores que 200 km contra vários ruídos de
fundo, como terra, céu e nuvens.
O laser deve ter um nível de energia
máximo de 150 mJ na banda que não fere o olho, e frequência
de repetição de pulso de mais de 20 Hz.
Em 1995, a Electronic System Center da
USAF premiou a Texas Instruments Defense Systems & Electronics Group
- agora parte da Raytheon Systems Company, com um contrato para construir
um protótipo de sensor chamado Extended Airborne Global Launch Evaluator
(EAGLE) para teste a bordo do E-3A AWACS. Um sensor IR daria rastreio em
ângulo e um laser mostraria distância.
O EAGLE foi incorporado ao programa Airborne
Laser (ABL). A LMEM venceu um contrato para fornecer seis sensores, cada
um combinando um AAS-42 com um laser do sistema LANTIRN, para equipar um
único ABL.
O ABL tem um requerimento de um número
maior de sensores de aquisição para detectar TBMs lançados
de quaisquer direções. A aeronave operacional deverá
levar pelo menos oito, com um processador central alimentando informações
para o sistema de gerenciamento de batalha de bordo.
O IRST fará parte do Infrared Surveillance
Subsystem (IRSS), que será usado para detectar e localizar precisamente
um TBM para engajamento pelo laser de vários MegaWatts. O IRSS usa
as últimas tecnologias de IRST e Active Ranging Sensor (ARS) para
realizar detecção e rastreio de alvos em tempo real. Os seis
IRST serão usados para cobrir um grande volume de espaço aéreo,
gerando rastreio em duas dimensões e alerta de mísseis na fase
de lançamento e pós-queima do lançador.

A plataforma escolhida para o ABL foi o Boeing 747.Casulo Designador a Laser
Um caça também pode usar
um casulo designador laser (PDL - Pod Designator Laser) com FLIR e
TV para funções ar-ar para realizar tarefas de um IRST. Os
modelos atuais ou modernizados, como o LANTIRN e o Litening, são equipados
com um modo ar-ar sob controle do radar ou mira no capacete do piloto para
apontar o sensor para o local desejado.
São ideais para identificação
visual a noite com o FLIR. As imagens são mostradas nas telas do cockpit.
Os PDLs já são considerados como uma boa combinação
com o IRST, que tem pouca capacidade em modos ar-solo, enquanto o PDL é
ruim para busca de volume (FOR pequeno).
Os modelos antigos de PDL eram otimizados
para designação de alvos a baixa altitude e tinham pouca definição
em alcances maiores. Após a Guerra do Golfo, com o uso de táticas
de vôo a grande altitude, os PDLs foram modernizados para enxergar a
distâncias maiores e passaram a ter um potencial para uso ar-ar.
Na década de
80 os americanos ficaram atrás dos russos em termos de IRST sendo que
o equivalente mais próximo era o LANTIRN com FLIR e telêmetro
laser que equipava o F-15E e F-16C/D. Durante a Guerra do Golfo em
1991 um F-15E usou um LANTIRN para gravar um F-15E voando a frente sendo derrubado
pela artilharia antiaérea. Os Mirage 2000-9 dos Emirados Árabes
usam o casulo Damocles no modo ar-ar para identificação de
alvos.
No futuro, os EUA planejam lançamentos
de armas guiadas a laser a 17 km de altitude e mais de 35 km de distância
do SAM mais próximo do alvo. Os novos sistemas terão uma maior
resoluçao para VID devido a regras de engajamento restrita.
Os novos sitemas irão combinar coleta
de informaçoes por IR, video, laser e outros, grande memória
e processamento de alta velocidade, formando imagem multiespectral do alvo
para VID através de algoritimo especial. Será capaz de detectar
mísseis SAM móveis, que usam tática de emitir e parar
para evitar ataque. O potencial de uso ar-ar é considerável.

 Imagens de uma demonstração
do FLIR de terceira geração do casulo Sniper. O casulo está
rastreando um B-52 taxiando em uma base aérea. O Sniper XR (eXtended
Range) venceu uma concorrência para um Advanced Targeting Pod (ATP)
para a USAF. Um total de 522 casulos serão adquiridos por US$ 843
milhões mais os acessórios. Equipará inicialmente os
F-16 e depois os F-15E. A primeira entrega está prevista para 2003.
A tecnologia
do Sniper XR será usada no EO DAS do F-35.
Imagens de uma demonstração
do FLIR de terceira geração do casulo Sniper. O casulo está
rastreando um B-52 taxiando em uma base aérea. O Sniper XR (eXtended
Range) venceu uma concorrência para um Advanced Targeting Pod (ATP)
para a USAF. Um total de 522 casulos serão adquiridos por US$ 843
milhões mais os acessórios. Equipará inicialmente os
F-16 e depois os F-15E. A primeira entrega está prevista para 2003.
A tecnologia
do Sniper XR será usada no EO DAS do F-35.Atualizado em: 15 de Março de 2007
Voltar ao Sistemas
de Armas
2001-2007
©Sistemas de Armas
Site criado e mantido por
Fabio Castro
Fórum - Dê a sua opinião
sobre os assuntos mostrados no Sistemas de Armas
Assine a lista para receber informações
sobre atualizações e participar das discussões enviando
um email
em branco para sistemasarmas-subscribe@yahoogrupos.com.br