Devido a sua capacidade inerente de surpresa, furtividade, capacidade de sobrevivência, mobilidade e resistência, os submarinos são o adversário mais mortais enfrentados pêlos comandantes navais modernos.
Até recentemente, a maior parte da doutrina de guerra anti-submarina (anti-submarine warfare – ASW) americana era direcionada em conter a ameaça submarina soviética no mar da Noruega e na falha GIUK para interditar as linhas de comunicação marítimas (sea lines of communication - SLOC) em suporte a guerra terrestre na Europa. Com a dissolução da União Soviética, esta possibilidade virtualmente se evaporou. No seu lugar, surgiram uma grande quantidade de ameaças potencialmente mais ameaçadora.
Com a perda de um desafio para manter a supremacia nos oceanos e com o clima político enfatizando a redução do orçamento, a estrutura marítima americana esta sendo constantemente desmantelada. Além disso, a hierarquia naval esta mudando a ênfase na missão estratégica de controle dos oceanos para operações conjuntas em conflitos costeiros.
Para esta capacidade, a marinha de águas-azuis está se tornando uma marinha de águas-marrons em vista de obter uma rápida projeção de forças sobre terra, através de ataques aéreos e de mísseis assim como forças anfíbias. Um comandante naval astuto está ciente que, para uma operação de projeção de força ser empreendida com um grau de risco aceitável, o controle do mar na área do objetivo deve ser obtido primeiro. Estará espreitando o novo perigo.
A Rússia está desesperada por recursos e as mercadorias mais disponíveis para exportação são equipamentos do seu arsenal de guerra. Embora seu esforço de vendas de armas tenha se estendido para todos tipos de plataformas menos as nucleares, o capítulo será focado na proliferação de submarinos que apóiam. Uma delas foi a aquisição de vários submarinos da classe "Kilo" pelo Irã. Estes barcos representam a mais avançada tecnologia diesel-elétrica no mundo, o que lhes dá uma assinatura acústica muito pequena e silenciosa. Não é necessário ser um analista militar para apreciar como a presença destas plataformas podem complicar as operações navais os futuros conflitos no Golfo Pérsico. Adicionalmente, a Líbia, Síria e Argélia operam submarinos de projeto soviético e podem conseguir outros submarinos.
Quando se adiciona este desenvolvimento
ao fato que a GAS (ou guerra A/S) em águas rasas é a forma mais
difícil de GAS de se conduzir, pode-se apreciar quantas estratégias
novas podem adicionar mais ênfase neste tipo de guerra. Como sempre
será lembrado nesta seção detalhes do impacto das condições
oceanográficas nas táticas, diferenças entre GAS de área
x GAS de ponto, como acessar a capacidade de suas próprias forças,
e outros tópicos de vital importância para sobrevivência
no campo de batalha.
O Ambiente de Operações
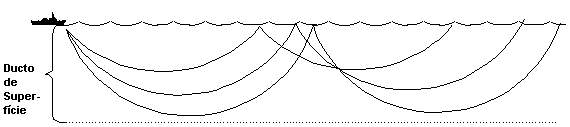
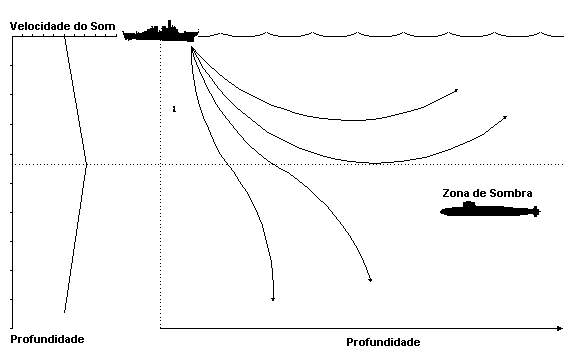
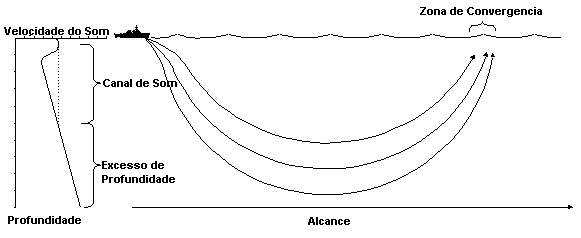
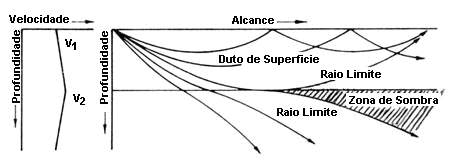
A propagação do som no oceano é afetada pela temperatura, pressão e salinidade. Destes, a temperatura é o fator determinante. A temperatura do oceano varia com a profundidade, mas em torno de 30 e 100 metros ocorre uma mudança abrupta entre a superfície mais quente e a fria, ainda mais abaixo. Esta mudança rápida na temperatura é conhecida como termocíclica, camada térmica, ou simplesmente como "camada". Abaixo da camada, a temperatura tende a ser isotérmica, ou relativamente constante.
A camada é taticamente significativa devido a várias razões. Acima de tudo, o som vindo de uma fonte da superfície em um lado da camada (acima ou abaixo) tende a permanecer presa neste lado. A mudança súbita na temperatura da água faz com que as ondas de som reflitam na camada. Não é uma barreira impenetrável pois existe alguma passagem, particularmente com sons de alta frequência como a cavitação (efeito de bolhas de ar em torno das hélices que quebram na esteira) e transmissões de sonar ativo.
Uma regra geral de conduta é que a maioria dos barulhos serão atenuados na maior parte se eles passarem pela camada. É possível ouvir barulhos feitos no seu lado da camada muito mais facilmente que os que atravessam.
Na realidade, a profundidade da camada varia de um local para outro e os submarinos tentam permanecer abaixo dela para se esconderem dos navios de superfície.
Ativo X Passivo
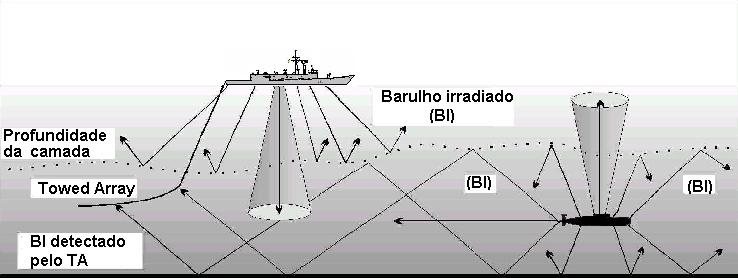
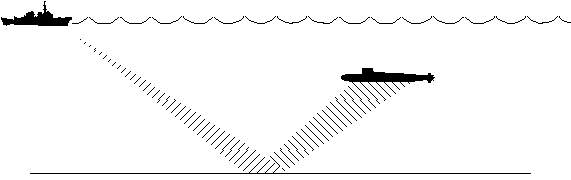
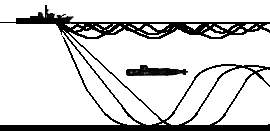
O comandante deve avaliar constantemente se sua política de emissões de sonar deve ser ativas ou passivas, baseado na situação tática. Para entender estes princípios, é importante primeiro ilustrar a influência da camada em encontros genéricos entre navios de superfície(Azul) e o submarino (Laranja). No primeiro caso, (Figura 6) o Azul está operando a 5 milhas a frente e abaixo da camada. Pode ser notado que as ondas de som emitidas pelas duas plataformas são mínimas, a não ser as que cruzam a camada em ângulo agudo (direto para cima ou para baixo) que irão atravessar, enquanto a maioria dos sons serão refletidos ou refratados. Estas ondas de som que penetram diretamente através da camada formas um cone estreito de som. No caso do Azul ou Laranja detectar o outro, ele deve passar através da trilha do cone, o que significa que deve estar diretamente acima ou abaixo um do outro, e a detecção será quase simultânea.
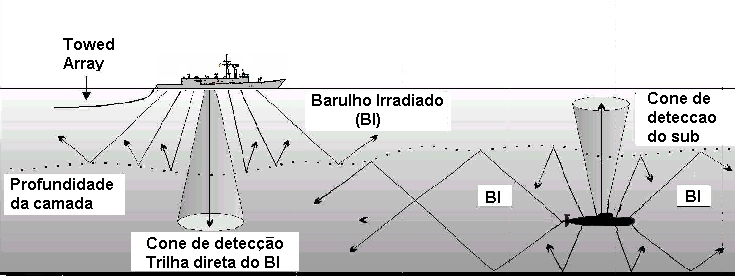
Figura 6: O efeito da camada na detecção de submarinos.