
O AGM-84E Standoff Land Attack Missile (SLAM) é míssil ar-superfície derivado do míssil anti-navio AGM-84 Harpoon. O SLAM foi projetado para ser lançado de aeronaves ou navios contra alvos de alto valor, em terra ou no mar, com pouco danos colaterais e pouco risco a plataforma lançadora. O projeto foi iniciado no meio da década de 80 como arma provisória até o AGM-137 Tri-Service Standoff Missile (TSSAM) entrar em operação.
O SLAM tem em comum com o Harpoon os controles, ogiva e seção de sustentação. A nova estrutura mais longa foi sendo adicionado um GPS da Rockwell-Collins para permitir atualizar e corrigir a trilha de vôo após o disparo, um sensor de imagem infravermelha do AGM-65 Maverick e o datalink AWW-13 da AGM-62 Walleye. O sensor infravermelho e o datalink permitem guiamento terminal do tipo "man-in-the-loop". O SLAM foi a primeira arma com guiamento por GPS.
O SLAM tem 4,5m de comprimento, maior que o Harpoon, com diâmetro do corpo de 34,3cm e envergadura de 91cm. O peso é de 628kg, ou 70kg a mais que o Harpoon. O motor é o turbojato Teledyne Continental CAE-J402-CA-400 com 299kg de empuxo usando combustível JP-10. O SLAM atinge uma velocidade de Mach 0.85 com um alcance de 111 km. A ogiva de 220kg DESTEX é do tipo explosiva/fragmentação com espoleta atraso ou impacto.
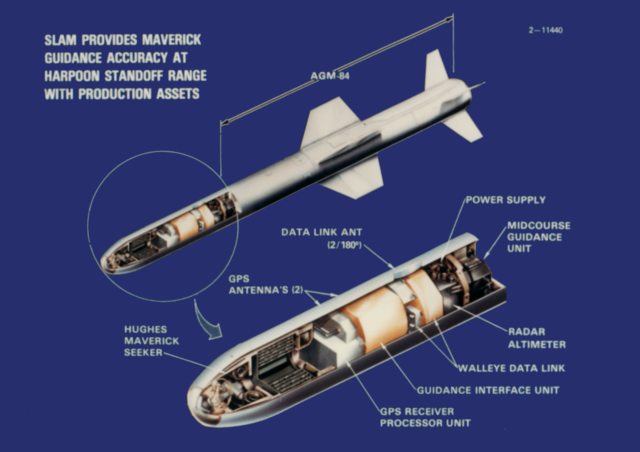
Detalhes internos do
SLAM.
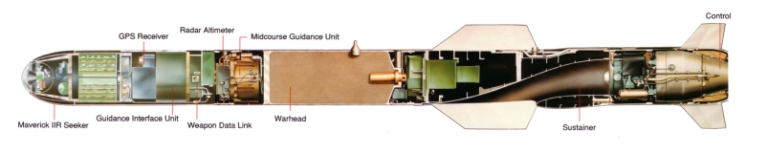
Detalhes internos do SLAM.
Após o disparo o míssil voa de forma autônoma até o alvo com ajuda do GPS. Em um ponto pré-programado um minuto antes impacto, o sensor IR é ligado e deve estar olhando direto para o alvo. Quando o sensor é ativado, o piloto/operador de sistemas recebe imagens de vídeo do alvo e pode selecionar o ponto de impacto para um ataque mais preciso. Depois o míssil opera de forma autônoma.
O míssil pode ser controlado de outra aeronave e não só da aeronave lançadora, bastando levar o casulo com datalink de via dupla. O uso do vídeo durante a trilha de vôo permite atacar alvos de oportunidade. O sensor varre 4 graus por segundo para poder buscar alvos de oportunidade.
Os modos de ataque são modo de ataque Pre-planned (PP) contra alvos fixos de alto valor ou alvos terrestres moveis e alvos de oportunidade - Target of Opportunity (TOO) contra navios no mar. A memória EEPROM pode receber quatro missões, geralmente três do tipo PP e um TOO, antes da decolagem com o Prelaunch Data Memory Loader (PDML) portátil. O PDML armazena 16 conjuntos de dados de missões para um período de oito horas. Demora cinco minutos para transferir os dados de planejamento de missão para o míssil.
Inicialmente foi usado o datalink AN/AWW-9 depois substituído pelo AN/AWW-13. O datalink opera em oito pares de freqüência de recepção/transmissão para que vários casulos possam operar na mesma área.
Durante os testes o SLAM foi
lançada de um A-6E e trancada no alvo por um A-7E. A mesma combinação
foi usada no primeiro voo operacional contra alvos no Iraque em 1991, embora
dois F/A-18 também tenham lançado e guiado o SLAM.
Nos testes foram realizados entre setembro de 1998 a fevereiro de 1999
com o SLAM mostrando a capacidade de navegar com GPS até o ponto
de impacto.
O desenvolvimento do SLAM durou 27 meses entrando em operação em 1990. A capacidade de operação total foi em 1993. A US Navy comprou 600 mísseis para armar seus A-6E e F/A-18 com a produção terminando em 1996. Também foi testado no F-16, P-3 e B-52.
Em 1996 foi iniciado o uso da estação de planejamento de missão Tactical Aircraft Mission Planning System (TAMPS). O planejamento de missão ficou muito mais fácil e rápido, diminuindo de 5-8 horas com uso de cartas e tabelas para 15-30 minutos.
O primeiro uso operacional foi na Guerra do Golfo de 1991 enquanto ainda estava em desenvolvimento. Sete mísseis foram disparados com quatro atingindo os alvos. A primeira missão foram dois disparos do A-6E sendo controlados pelos A-7E do USS Kennedy. Atacaram uma estação geradora de energia com o primeiro míssil fazendo um buraco e o segundo passando pelo buraco. No segundo ataque contra um quartel general da marinha iraquiana o piloto estava evadindo um míssil e com sinal de alerta geral na cabine durante a fase terminal do míssil. Dois atingiram um complexo industrial.
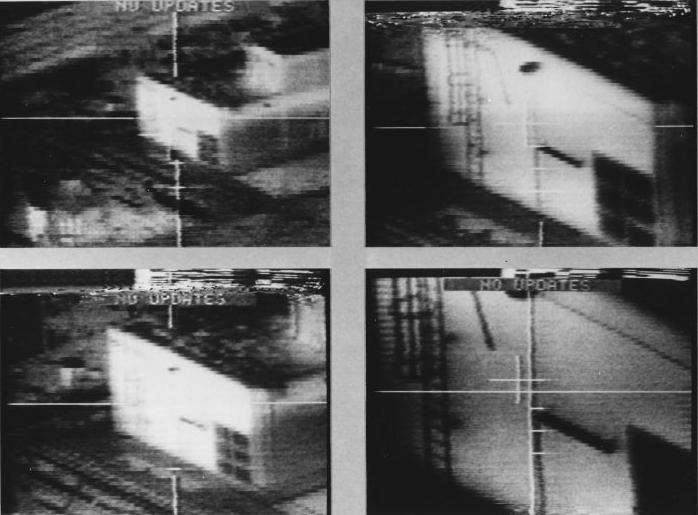
Imagem de um SLAM atacando
um alvo no Iraque em 1991.
A versão lançada
de navio Ship Launch SLAM (SLS) teve o primeiro disparo em junho de 1990
no USS Lake Champlain (CG 57) com o alvo sendo designado por um SH-60B Sea
Hawk com datalink. O programa evoluiu lentamente até 1995 quando foi
anunciado um contrato para desenvolver o Sea SLAM como parte do programa
Surface Fire Support para dar capacidade de ataque de precisão contra
alvos de alto valor em terra e navios. Dois Sea SLAM foram testados em abril
de 1996 contra alvos em terra com designação terminal feita
por um helicóptero SH-60 LAMPS III no primeiro teste e um F/A-18 no
segundo. O Sea SLAM foi proposto para lançar oito submunições
BAT ou 153 CEM ou ogiva unitária. Também receberia o motor
de aceleração do Harpoon e os lançadores em container.
O projeto Sea Slam teve pouco interesse pela US Navy e foi abandonado.
Esta capacidade fornecida pelo Sea SLAM estará disponível
com o Harpoon Block II que terá capacidade de ataque terrestre, mas
só com GPS/INS. Harpoon 2 usa o mesmo GPS e sistema de planejamento
de missão do SLAM. Estava planejado o uso de um sensor IIR, com o radar
ou sozinho no Block II+ em 2002. A ogiva unitária pode ser substituída
por oito BAT ou 153 CEM submunições e com opção
de usar ogiva penetrante como a Broach. O Harpoon Block III seria um projeto
longo prazo, após 2008, com datalink, sensor triplo e lançamento
vertical.

Testes do Sea Slam a
partir do USS Lake Champlain
2007 ©Sistemas de Armas
Site criado e mantido por Fábio Castro
| Opinião |
Fórum -
Dê a sua opinião sobre
os assuntos mostrados no Sistemas de Armas
Assine a lista para
receber informações sobre atualizações e participar das discussões enviando
um email
em branco para
sistemasarmas-subscribe@yahoogrupos.com.br